victoriaMetrics库布隆过滤器初始化及使用详解
目录
- victoriaMetrics库布隆过滤器
- 概述
- 限速器的初始化
- 总结
victoriaMetrics库布隆过滤器
代码路径:/lib/bloomfilter
概述
victoriaMetrics的vmstorage组件会接收上游传递过来的指标,在现实场景中,指标或瞬时指标的数量级可能会非常恐怖,如果不限制缓存的大小,有可能会由于cache miss而导致出现过高的slow insert。
为此,vmstorage提供了两个参数:maxHourlySeries和maxDailySeries,用于限制每小时/每天添加到缓存的唯一序列。
唯一序列指表示唯一的时间序列,如metrics{label1="value1",label2="value2"}属于一个时间序列,但多条不同值的metrics{label1="value1",label2="value2"}属于同一条时间序列。victoriaMetrics使用如下方式来获取时序的唯一标识:
func getLabelsHash(labels []prompbmarshal.Label) uint64 {
bb := labelsHashBufPool.Get()
b := bb.B[:0]
for _, label := range labels {
b = append(b, label.Name...)
b = append(b, label.Value...)
}
h := xxhash.Sum64(b)
bb.B = b
labelsHashBufPool.Put(bb)
return h
}
限速器的初始化
victoriaMetrics使用了一个类似限速器的概念,限制每小时/每天新增的唯一序列,但与普通的限速器不同的是,它需要在序列级别进行限制,即判断某个序列是否是新的唯一序列,如果是,则需要进一步判断一段时间内缓存中新的时序数目是否超过限制,而不是简单地在请求层面进行限制。
hourlySeriesLimiter = bloomfilter.NewLimiter(*maxHourlySeries, time.Hour) dailySeriesLimiter = bloomfilter.NewLimiter(*maxDailySeries, 24*time.Hour)
下面是新建限速器的函数,传入一个最大(序列)值,以及一个刷新时间。该函数中会:
- 初始化一个限速器,限速器的最大元素个数为
maxItems - 则启用了一个goroutine,当时间达到
refreshInterval时会重置限速器
func NewLimiter(maxItems int, refreshInterval time.Duration) *Limiter {
l := &Limiter{
maxItems: maxItems,
stopCh: make(chan struct{}),
}
l.v.Store(newLimiter(maxItems)) //1
l.wg.Add(1)
go func() {
defer l.wg.Done()
t := time.NewTicker(refreshInterval)
defer t.Stop()
for {
select {
case <-t.C:
l.v.Store(newLimiter(maxItems))//2
case <-l.stopCh:
return
}
}
}()
return l
}
限速器只有一个核心函数Add,当vmstorage接收到一个指标之后,会(通过getLabelsHash计算该指标的唯一标识(h),然后调用下面的Add函数来判断该唯一标识是否存在于缓存中。
如果当前存储的元素个数大于等于允许的最大元素,则通过过滤器判断缓存中是否已经存在该元素;否则将该元素直接加入过滤器中,后续允许将该元素加入到缓存中。
func (l *Limiter) Add(h uint64) bool {
lm := l.v.Load().(*limiter)
return lm.Add(h)
}
func (l *limiter) Add(h uint64) bool {
currentItems := atomic.LoadUint64(&l.currentItems)
if currentItems >= uint64(l.f.maxItems) {
return l.f.Has(h)
}
if l.f.Add(h) {
atomic.AddUint64(&l.currentItems, 1)
}
return true
}
上面的过滤器采用的是布隆过滤器,核心函数为Has和Add,分别用于判断某个元素是否存在于过滤器中,以及将元素添加到布隆过滤器中。
过滤器的初始化函数如下,bitsPerItem是个常量,值为16。bitsCount统计了过滤器中的总bit数,每个bit表示某个值的存在性。bits以64bit为单位的(后续称之为slot,目的是为了在bitsCount中快速检索目标bit)。计算bits时加上63的原因是为了四舍五入向上取值,比如当maxItems=1时至少需要1个unit64的slot。
func newFilter(maxItems int) *filter {
bitsCount := maxItems * bitsPerItem
bits := make([]uint64, (bitsCount+63)/64)
return &filter{
maxItems: maxItems,
bits: bits,
}
}
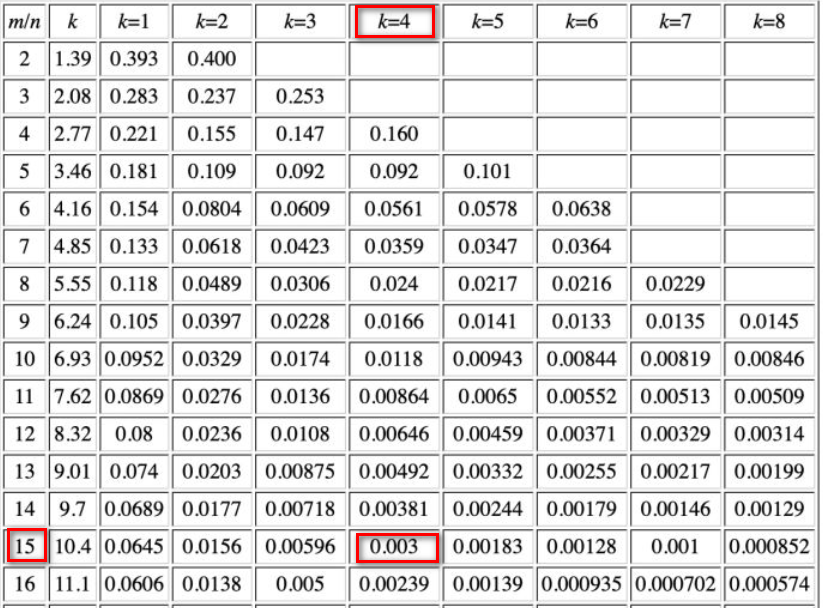
为什么bitsPerItem为16?这篇文章给出了如何计算布隆过滤器的大小。在本代码中,k为4(hashesCount),期望的漏失率为0.003(可以从官方的filter_test.go中看出),则要求总存储和总元素的比例为15,为了方便检索slot(64bit,为16的倍数),将之设置为16。
if p > 0.003 {
t.Fatalf("too big false hits share for maxItems=%d: %.5f, falseHits: %d", maxItems, p, falseHits)
}
下面是过滤器的Add操作,目的是在过滤器中添加某个元素。Add函数中没有使用多个哈希函数来计算元素的哈希值,转而改变同一个元素的值,然后对相应的值应用相同的哈希函数,元素改变的次数受hashesCount的限制。
- 获取过滤器的完整存储,并转换为以bit单位
- 将元素
h转换为byte数组,便于xxhash.Sum64计算 - 后续将执行hashesCount次哈希,降低漏失率
- 计算元素h的哈希
- 递增元素
h,为下一次哈希做准备 - 取余法获取元素的bit范围
- 获取元素所在的slot(即uint64大小的bit范围)
- 获取元素所在的slot中的bit位,该位为1表示该元素存在,为0表示该元素不存在
- 获取元素所在bit位的掩码
- 加载元素所在的slot的数值
- 如果
w & mask结果为0,说明该元素不存在, - 将元素所在的slot(
w)中的元素所在的bit位(mask)置为1,表示添加了该元素 - 由于
Add函数可以并发访问,因此bits[i]有可能被其他操作修改,因此需要通过重新加载(14)并通过循环来在bits[i]中设置该元素的存在性
func (f *filter) Add(h uint64) bool {
bits := f.bits
maxBits := uint64(len(bits)) * 64 //1
bp := (*[8]byte)(unsafe.Pointer(&h))//2
b := bp[:]
isNew := false
for i := 0; i < hashesCount; i++ {//3
hi := xxhash.Sum64(b)//4
h++ //5
idx := hi % maxBits //6
i := idx / 64 //7
j := idx % 64 //8
mask := uint64(1) << j //9
w := atomic.LoadUint64(&bits[i])//10
for (w & mask) == 0 {//11
wNew := w | mask //12
if atomic.CompareAndSwapUint64(&bits[i], w, wNew) {//13
isNew = true//14
break
}
w = atomic.LoadUint64(&bits[i])//14
}
}
return isNew
}
看懂了Add函数,Has就相当简单了,它只是Add函数的缩减版,无需设置bits[i]:
func (f *filter) Has(h uint64) bool {
bits := f.bits
maxBits := uint64(len(bits)) * 64
bp := (*[8]byte)(unsafe.Pointer(&h))
b := bp[:]
for i := 0; i < hashesCount; i++ {
hi := xxhash.Sum64(b)
h++
idx := hi % maxBits
i := idx / 64
j := idx % 64
mask := uint64(1) << j
w := atomic.LoadUint64(&bits[i])
if (w & mask) == 0 {
return false
}
}
return true
}
总结
由于victoriaMetrics的过滤器采用的是布隆过滤器,因此它的限速并不精准,在源码条件下, 大约有3%的偏差。但同样地,由于采用了布隆过滤器,降低了所需的内存以及相关计算资源。此外victoriaMetrics的过滤器实现了并发访问。
在大流量场景中,如果需要对请求进行相对精准的过滤,可以考虑使用布隆过滤器,降低所需要的资源,但前提是过滤的结果能够忍受一定程度的漏失率。
以上就是victoriaMetrics库布隆过滤器初始化及使用详解的详细内容,更多关于victoriaMetrics库布隆过滤器的资料请关注我们其它相关文章!
相关推荐
-
布隆过滤器的概述及Python实现方法
布隆过滤器 布隆过滤器是一种概率空间高效的数据结构.它与hashmap非常相似,用于检索一个元素是否在一个集合中.它在检索元素是否存在时,能很好地取舍空间使用率与误报比例.正是由于这个特性,它被称作概率性数据结构(probabilistic data structure). 空间效率 我们来仔细地看看它的空间效率.如果你想在集合中存储一系列的元素,有很多种不同的做法.你可以把数据存储在hashmap,随后在hashmap中检索元素是否存在,hashmap的插入和查询的效率都非常高.但是,由于ha
-

Java实现布隆过滤器的方法步骤
前言 记得前段时间的文章么?redis使用位图法记录在线用户的状态,还是需要自己实现一个IM在线用户状态的记录,今天来讲讲另一方案,布隆过滤器 布隆过滤器的作用是加快判定一个元素是否在集合中出现的方法.因为其主要是过滤掉了大部分元素间的精确匹配,故称为过滤器. 布隆过滤器 在日常生活工作,我们会经常遇到这的场景,从一个Excel里面检索一个信息在不在Excel表中,还记得被CTRL+F支配的恐惧么,不扯了,软件开发中,一般会使用散列表来实现,Hash Table也叫哈希表,哈希表的优点是快速准确
-
布隆过滤器的原理以及java 简单实现
一.布隆过滤器 布隆过滤器(Bloom Filter)是1970年由布隆提出的.它实际上是一个很长的二进制向量和一系列随机映射函数.布隆过滤器可以用于检索一个元素是否在一个集合中.它的优点是空间效率和查询时间都远远超过一般的算法,缺点是有一定的误识别率和删除困难. 如果想判断一个元素是不是在一个集合里,一般想到的是将集合中所有元素保存起来,然后通过比较确定.链表.树.散列表(又叫哈希表,Hash table)等等数据结构都是这种思路.但是随着集合中元素的增加,我们需要的存储空间越来越大.同时检索
-
Redis实现布隆过滤器的方法及原理
布隆过滤器(Bloom Filter)是1970年由布隆提出的.它实际上是一个很长的二进制向量和一系列随机映射函数.布隆过滤器可以用于检索一个元素是否在一个集合中.它的优点是空间效率和查询时间都比一般的算法要好的多,缺点是有一定的误识别率和删除困难. 本文将介绍布隆过滤器的原理以及Redis如何实现布隆过滤器. 应用场景 1.50亿个电话号码,现有10万个电话号码,如何判断这10万个是否已经存在在50亿个之中?(可能方案:数据库,set, hyperloglog) 2.新闻客户端看新闻时,它会不
-
通过实例解析布隆过滤器工作原理及实例
布隆过滤器 布隆过滤器是一种数据结构,比较巧妙的概率型数据结构(probabilistic data structure),特点是高效地插入和查询,可以用来告诉你 "一定不存在或者可能存在". 相比于传统的 List.Set.Map 等数据结构,它更高效.占用空间更少,但是缺点是其返回的结果是概率性的,而不是确切的. 布隆过滤器的工作原理 假设一个长度为m的bit类型的数组,即数组中每个位置只占一个bit,每个bit只有两种状态:0,1,所有bit的初始状态都为0. 再假设一共有k个哈
-
victoriaMetrics库布隆过滤器初始化及使用详解
目录 victoriaMetrics库布隆过滤器 概述 限速器的初始化 总结 victoriaMetrics库布隆过滤器 代码路径:/lib/bloomfilter 概述 victoriaMetrics的vmstorage组件会接收上游传递过来的指标,在现实场景中,指标或瞬时指标的数量级可能会非常恐怖,如果不限制缓存的大小,有可能会由于cache miss而导致出现过高的slow insert. 为此,vmstorage提供了两个参数:maxHourlySeries和maxDailySeries
-
C++ BloomFilter布隆过滤器应用及概念详解
目录 一.布隆过滤器概念 二.布隆过滤器应用 三.布隆过滤器实现 1.插入 2.查找 3.删除 四.布隆过滤器优缺 五.结语 一.布隆过滤器概念 布隆过滤器是由布隆(Burton Howard Bloom)在1970年提出的 一种紧凑型的.比较巧妙的概率型数据结构,特点是高效地插入和查询,可以用来告诉你 “某样东西一定不存在或者可能存在”,它是用多个哈希函数,将一个数据映射到位图结构中.此种方式不仅可以提升查询效率,也可以节省大量的内存空间 . 位图的优点是节省空间,快,缺点是要求范围相对集中,
-
Redis 布隆过滤器命令的使用详解
目录 一.Docker 安装 Redis 布隆过滤器 学习历史重要原因之一,就是要学会感恩,因为我们都是站在巨人的肩膀上. 1.1.安装 注意: 1.2.测试 二.RedisBloom 命令讲解 2.1.命令大纲 2.2.BF.ADD 和 BF.MADD 2.3.BF.EXISTS 和 BF.MEXISTS 2.4.BF.INFO 2.5.BF.RESERVE 2.6.BF.INSERT 因为平常使用 Docker 比较多,所以照常还是使用Docker来准备环境啦. 一.Docker 安装 Re
-
Filter过滤器和Listener监听器详解
Filter过滤器和Listener监听器详解 Filter过滤器 Filter的简介 对资源的访问进行过滤,相当于小区的保安,进去要检查,出去还要检查. Filter的使用 编写一个类,继承并实现javax.servlet.Filter. package com.jyh.filter; import java.io.IOException; import javax.servlet.Filter; import javax.servlet.FilterChain; import javax.
-
Python黑魔法库安装及操作字典示例详解
目录 1. 安装方法 2. 简单示例 3. 兼容字典的所有操作 4. 设置返回默认值 5. 工厂函数自动创建key 6. 序列化的支持 7. 说说局限性 本篇文章收录于<Python黑魔法手册>v3.0 第七章,手册完整版在线阅读地址:Python黑魔法手册 3.0 文档 字典是 Python 中基础的数据结构之一,字典的使用,可以说是非常的简单粗暴,但即便是这样一个与世无争的数据结构,仍然有很多人 "用不惯它" . 也许你并不觉得,但我相信,你看了这篇文章后,一定会和我一
-
vue实例成员 插值表达式 过滤器基础教程示例详解
目录 一. 什么是Vue 二.为什么学Vue 三.如何使用Vue 下载安装? 插值表达式 四.vue特点 1.虚拟DOM 2.数据的双向绑定 3.单页面应用 4.数据驱动 五.Vue实例 六.实例成员 - 挂载点 | el - 自定义插值表达式括号| delimiters - 数据 | data - 过滤器 | filters - 方法 | methods - js对象(即字典)补充 - 插值表达式转义 | delimters - 计算属性 | computed - 监听属性 | watch 一
-
C++使用easyX库实现三星环绕效果流程详解
目录 1,项目描述 2,解决思路 3,关键代码 4,项目运行截图 5,具体代码实现 1,项目描述 功能1:使用图形化的方式描述地球围绕着太阳转动,月球围绕着地球转动 功能2:在转动的过程中当用户按下1,2,3,4,5,6,7时它可以变换出7种不同的颜色,当用户按下8时它可以变换从1-7的颜色依次变换当用户再次按下8键时停止变换颜色 功能3:当用户按下上键时,地球会围绕太阳反转,当再次按下上键时地球会恢复到正转 功能4:当用户按下空格键的时候,所有动画暂停,当再次按下空格键的时候所有动画继续进行.
-
JavaWeb中过滤器Filter的用法详解
目录 过滤器Filter 处理顺序 使用场景 自定义过滤器 源码分析 FilterDef FilterMap 初始化过滤器 创建过滤器链 ApplicationFilterChain 执行过滤器链 过滤器Filter 过滤器通常对一些web资源进行拦截,做完一些处理器再交给下一个过滤器处理,直到所有的过滤器处理器,再调用servlet实例的service方法进行处理.过滤器可以对request进行处理也可以对response进行处理. 处理顺序 如果过滤器链顺序如上图所示,那么对request请
-
SpringBoot 过滤器 Filter使用实例详解
目录 简介 用法 功能 实现 简介 过滤器是AOP(面向切面编程)思想的具体实现.可以过滤浏览器发出的请求,并且决定放行请求还是中断请求. 在浏览器对服务器发起请求或者服务器对浏览器响应,都会经过过滤器. 基于过滤器的机制,我们可以在过滤器中对请求和响应做一些处理,可以在过滤器中决定是否放行,例如:校验请求中有没有敏感字符串,校验有没有Session,实现URL级别的权限控制.压缩响应信息.编码格式等. 用法 在spring的应用中我们存在两种过滤的用法,一种是拦截器.另外一种当然是过滤器.我们
-
Python Asyncio库之asyncio.task常用函数详解
目录 前记 0.基础 1.休眠--asyncio.sleep 2.屏蔽取消--asyncio.shield 3.超时--asyncio.wait_for 4.简单的等待--wait 5.迭代可等待对象的完成--asyncio.as_completed 前记 Asyncio在经过一段时间的发展以及获取Curio等第三方库的经验来提供更多的功能,目前高级功能也基本完善,但是相对于其他语言,Python的Asyncio高级功能还是不够的,但好在Asyncio的低级API也比较完善,开发者可以通过参考A