python用opencv完成图像分割并进行目标物的提取
运行平台: Windows
Python版本: Python3.x
IDE: Spyder
今天我们想实现的功能是对单个目标图片的提取如图所示:
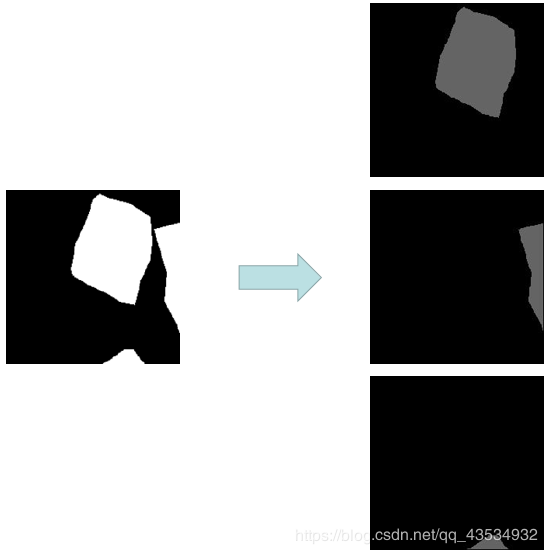
图片读取
###############头文件 import matplotlib.pyplot as plt import os import cv2 import numpy as np from PIL import Image #from skimage import io import random from PIL import Image
首先要完成图片的读取,通过cv2.imshow显示``
img = cv2.imread("1_3img.png")############图片读取
#cv2.imshow('picture', img)
#cv2.waitKey(0)
pictue_size=img.shape
picture_height=pictue_size[0]
picture_width=pictue_size[1]
边界提取
################灰度化,以及二值化 gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret, binary = cv2.threshold(gray,1,255,cv2.THRESH_BINARY) ############################ ######################边界提取,contours包含边界值的坐标 contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
边界提取采用cv2.findContours,在进行边缘提取的时候要把图像处理为二值图像,这里要说明一下,不同版本的opencv,cv2.findContours输出的值不同,有两个有三个,我们这个opencv版本输出为两个。
coontours为所有边界点的集合,是一个list,我们图中有三个区域,所以len(list)=3,每一个list里包含边界值数据。
图片提取
img2=[0 for i in range(len(contours))]
print(len(contours))
for i in range(len(contours)):
img2[i]=cv2.imread("./blackboard/test.jpg")############黑色底板图片读取
print(img2[i].shape)
# cv2.drawContours(img2[i],contours[i],-1,(0,0,255),3) #########画边界
###############全图片遍历找到相应的在轮廓之内的点
for a in range(picture_height):
for b in range(picture_width):
#############################################辨别是否在轮廓内是定义为1,不是定义为-1
result = cv2.pointPolygonTest(contours[i], (a,b), False)
if result>0:
img2[i][b,a]=100
##############下面填写保存代码
scipy.misc.imsave('picture'+str(i)+'.jpg',img2[i])
我们先读取一个黑色底版图片,里面所有的值为0,通过cv2.pointPolygonTest函数来分析像素点的位置是否在边界区域内,是返回1,不是返回-1,是的点我们赋值为100,并保存,最后得到我们想要的图片啦
到此这篇关于python用opencv完成图像分割并进行目标物的提取的文章就介绍到这了,更多相关python opencv图像分割并提取内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
5行Python代码实现图像分割的步骤详解
众所周知图像是由若干有意义的像素组成的,图像分割作为计算机视觉的基础,对具有现有目标和较精确边界的图像进行分割,实现在图像像素级别上的分类任务. 图像分割可分为语义分割和实例分割两类,区别如下: 语义分割:将图像中每个像素赋予一个类别标签,用不同的颜色来表示: 实例分割:无需对每个像素进行标记,只需要找到感兴趣物体的边缘轮廓. 图像分割通常应用如下所示: 专业检测:应用于专业场景的图像分析,比如在卫星图像中识别建筑.道路.森林,或在医学图像中定位病灶.测量面积等: 智能交通:识别道路信息,包括车
-
Python实现投影法分割图像示例(二)
在上篇博客中,我们已经实现了水平投影和垂直投影图的绘制.接下来,我们可以根据获得的投影数据进行图像的分割,该法用于文本分割较多,所以此处依然以上次的图为例. 先把上次的两幅图搬过来,方便讲解. 上面两图分别从垂直和水平方向描述了图像中文本的分布.我们想象一下,将两幅图重叠起来(当然这里比例要调整下),那么我们就能得到四个重叠的白块,而这些白块所处的位置正是原图中文本的位置.所以接下来的任务就是,找出这些白块的坐标,此处白块近似矩形,所以我们要求矩形的四个坐标. 下面看代码. #根据水平投影值选定
-
Python实现投影法分割图像示例(一)
投影法多用于图像的阈值分割.闲话不多说,现用Python实现. 上代码. import cv2 import numpy img = cv2.imread('D:/0.jpg', cv2.COLOR_BGR2GRAY) height, width = img.shape[:2] #resized = cv2.resize(img, (3*width,3*height), interpolation=cv2.INTER_CUBIC) #二值化 (_, thresh) = cv2.threshold
-
python实点云分割k-means(sklearn)详解
本文实例为大家分享了Python实点云分割k-means(sklearn),供大家参考,具体内容如下 植物叶片分割 import numpy as np import matplotlib.pyplot as plt import pandas as pd from sklearn.cluster import KMeans from sklearn.preprocessing import StandardScaler from mpl_toolkits.mplot3d import Axes
-
python用opencv完成图像分割并进行目标物的提取
运行平台: Windows Python版本: Python3.x IDE: Spyder 今天我们想实现的功能是对单个目标图片的提取如图所示: 图片读取 ###############头文件 import matplotlib.pyplot as plt import os import cv2 import numpy as np from PIL import Image #from skimage import io import random from PIL import Image
-

Python使用OpenCV和K-Means聚类对毕业照进行图像分割
图像分割是将图像分割成多个不同区域(或片段)的过程.目标是将图像的表示变成更容易和更有意义的图像. 在这篇博客中,我们将看到一种图像分割方法,即K-Means Clustering. K-Means 聚类是一种无监督机器学习算法,旨在将N 个观测值划分为K 个聚类,其中每个观测值都属于具有最近均值的聚类.集群是指由于某些相似性而聚合在一起的数据点的集合.对于图像分割,这里的簇是不同的图像颜色. 我们使用的环境是pip install opencv-python numpy matplotlib
-
通过 Python 和 OpenCV 实现目标数量监控
今天我们将利用python+OpenCV实现对视频中物体数量的监控,达到视频监控的效果,比如洗煤厂的监控水龙头的水柱颜色,当水柱为黑色的超过了一半,那么将说明过滤网发生了故障.当然不仅如此,我们看的是图像视频处理的技巧,你也可以将项目迁移到其他地方等,这仅仅是一个例子而已.我们知道计算机视觉中关于图像识别有四大类任务: . 分类-Classification:解决"是什么?"的问题,即给定一张图片或一段视频判断里面包含什么类别的目标. 定位-Location:解决"在哪里?&
-
Python 使用Opencv实现目标检测与识别的示例代码
在上章节讲述到图像特征检测与匹配 ,本章节是讲述目标检测与识别.后者是在前者的基础上进一步完善. 在本章中,我们使用HOG算法,HOG和SIFT.SURF同属一种类型的描述符.功能代码如下: import cv2 def is_inside(o, i): ox, oy, ow, oh = o ix, iy, iw, ih = i # 如果符合条件,返回True,否则返回False return ox > ix and oy > iy and ox + ow < ix + iw and o
-
Python使用OPENCV的目标跟踪算法实现自动视频标注效果
先上效果 1.首先,要使用opencv的目标跟踪算法,必须要有opencv环境 使用:opencv==4.4.0 和 opencv-contrib-python==4.4.0.46,lxml 这三个环境包. 也可以使用以下方法进行下载 : pip install opencv-python==4.4.0 pip install opencv-contrib-python==4.4.0.4 pip install lxml 2.使用方法: (1):英文状态下的 "s" 是进行标注 (
-
python利用opencv调用摄像头实现目标检测
目录 使用到的库 实现思路 实现代码 2020/4/26更新:FPS计算 FPS记录的原理 FPS实现代码 使用到的库 好多人都想了解一下如何对摄像头进行调用,然后进行目标检测,于是我做了这个小BLOG. opencv-python==4.1.2.30 Pillow==6.2.1 numpy==1.17.4 这些都是通用的库,版本不同问题应该也不大. 实现思路 利用opencv调用摄像头,读取每一帧传入目标检测网络检测,将检测结果呈现. 由于本文所用的检测格式为RGB格式,CV2读取的时候会使用
-
Python 第三方opencv库实现图像分割处理
目录 前言 1.加载图片 2.对图片做灰度处理 3.对图片做二值化处理 3.1.自定义阈值 4.提取轮廓 5.对轮廓画矩形框 6.分割图片并保存 7.查看分割图片 8.完整代码 前言 所需要安装的库有: pip install opencv-python pip install matplotlib Python接口帮助文档网址:https://docs.opencv.org/4.5.2/d6/d00/tutorial_py_root.html 本文所用到的图片素材: 首先,导入所用到的库: i
-
python利用opencv如何实现答题卡自动判卷
目录 1.设定答题卡模板 2.读取答题卡图像并对图像进行灰度化处理 3.高斯模糊图像去噪点 4.使用大津法二值分割图像 5.使用开运算去噪点 6.使用canny边缘检测算法 7.筛选答题区域轮廓,透视变换矫正目标区域 使用摄像头实时判卷部分 总结 1.设定答题卡模板 该图像为答题卡的答题区域,黑色边框是为了能够在各种环境中轻易的检测,左部分和上部分的黑色矩形,是为能够定位到答题选项的坐标而设置,同时题目数量为20×3共60道选择题,在进行批改试卷之前,需要手动输入该次考试的正确答案作为模板来对识
-
python开启摄像头以及深度学习实现目标检测方法
最近想做实时目标检测,需要用到python开启摄像头,我手上只有两个uvc免驱的摄像头,性能一般.利用python开启摄像头费了一番功夫,主要原因是我的摄像头都不能用cv2的VideCapture打开,这让我联想到原来opencv也打不开Android手机上的摄像头(后来采用QML的Camera模块实现的).看来opencv对于摄像头的兼容性仍然不是很完善. 我尝了几种办法:v4l2,v4l2_capture以及simpleCV,都打不开.最后采用pygame实现了摄像头的采集功能,这里直接给大
-
Python基于OpenCV库Adaboost实现人脸识别功能详解
本文实例讲述了Python基于OpenCV库Adaboost实现人脸识别功能.分享给大家供大家参考,具体如下: 以前用Matlab写神经网络的面部眼镜识别算法,研究算法逻辑,采集大量训练数据,迭代,计算各感知器的系数...相当之麻烦~而现在运用调用pythonOpenCV库Adaboost算法,无需知道算法逻辑,无需进行模型训练,人脸识别变得相当之简单了. 需要用到的库是opencv(open source computer vision),下载安装方式如下: 使用pip install num