python3+openCV 获取图片中文本区域的最小外接矩形实例
我就废话不多说了,大家还是直接看代码吧!
print("thresh =",thresh)
coords = np.column_stack(np.where(thresh > 0))//获取thresh二值灰度图片中的白色文字区域的点
print("coords =",coords)
min_rect = cv2.minAreaRect(coords)//由点集获取最小矩形(包含中心坐标点、宽和高、偏转角度)
print("min_rec =",min_rect)
box = cv2.boxPoints(min_rect)//获取最小矩形的4个顶点坐标。
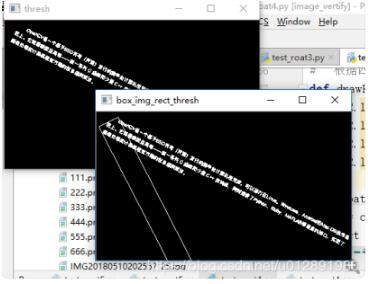
但是通过一下这个绘制矩形函数,画出来上述的最小矩形与文字区域偏差很大,但是获取到的偏转角度是对的。
不明白他们什么关系啊?
# 根据四点画原矩形 def drawRect(img, pt1, pt2, pt3, pt4, color, lineWidth): cv2.line(img, tuple(pt1), tuple(pt2), color, lineWidth) cv2.line(img, tuple(pt2), tuple(pt3), color, lineWidth) cv2.line(img, tuple(pt3), tuple(pt4), color, lineWidth) cv2.line(img, tuple(pt1), tuple(pt4), color, lineWidth)
有哪路朋友路过,帮一下忙,给指点一二,多谢朋友
附实验问题截图:
补充知识:opencv2 3.2 类中实现提取蓝天颜色
我就废话不多说了,大家还是直接看代码吧!
#include<iostream>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
class ColorDetector{
private:
int maxDist; //最小差距
Vec3b target ; //目标颜色
Mat result;
public:
ColorDetector():maxDist(100),target(0,0,0)
{
}
void setColorDistanceThreshold(int distance) //设置颜色差距的阈值
{
if(distance<0)
distance=0;
maxDist=distance;
}
int getColorDistanceThreshold() const //取得颜色差距的阈值
{
return maxDist;
}
void setTargetColor(uchar blue,uchar green,uchar red) //设置需要检测的颜色
{
target=Vec3b(blue,green,red);
}
void setTargetColor(Vec3b color)
{
target=color;
}
Vec3b getTargetColor() const
{
return target;
}
Mat process(const cv::Mat &image) ;
int getDistance(const Vec3b &color) ;
};
Mat ColorDetector::process(const cv::Mat &image)
{
result.create(image.rows,image.cols,CV_8U);
Mat_<Vec3b>::const_iterator it=image.begin<Vec3b>();
Mat_<Vec3b>::const_iterator itend=image.end<Vec3b>();
Mat_<uchar>::iterator itout=result.begin<uchar>();
for ( ; it!= itend; ++it, ++itout)
{
if (getDistance(*it)<maxDist)
{
*itout=255;
}
else
{
*itout=0;
}
}
return result;
}
int ColorDetector::getDistance(const Vec3b &color)
{
return abs(color[0]-target[0])+
abs(color[1]-target[1])+
abs(color[2]-target[2]);
}
void main()
{
ColorDetector cdetect;
Mat img=imread("C:\\Users\\Administrator\\Desktop\\工作\\testp\\boldt.jpg");
if(img.empty())
return;
cdetect.setTargetColor(230,190,130);
imshow("original",img);
imshow("result",cdetect.process(img));
waitKey(0);
}
以上这篇python3+openCV 获取图片中文本区域的最小外接矩形实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
python实现图片中文字分割效果
本文实例为大家分享了python实现图片中文字分割的具体代码,供大家参考,具体内容如下 1.原始图片(包含数字): 结果图: 2.原始图片(包含文字): 结果图: 3.代码如下: import cv2 import numpy as np path = 'test.jpg' root = 'output\\' # 图像resize dsize = 36 img = cv2.imread(path) data = np.array(img) height = data.shape[0] width
-
对python opencv 添加文字 cv2.putText 的各参数介绍
如下所示: cv2.putText(img, str(i), (123,456)), font, 2, (0,255,0), 3) 各参数依次是:图片,添加的文字,左上角坐标,字体,字体大小,颜色,字体粗细 其中字体可以选择 FONT_HERSHEY_SIMPLEX Python: cv.FONT_HERSHEY_SIMPLEX normal size sans-serif font FONT_HERSHEY_PLAIN Python: cv.FONT_HERSHEY_PLAIN small s
-

python opencv minAreaRect 生成最小外接矩形的方法
使用python opencv返回点集cnt的最小外接矩形,所用函数为 cv2.minAreaRect(cnt) ,cnt是点集数组或向量(里面存放的是点的坐标),并且这个点集不定个数. 举例说明:画一个任意四边形(任意多边形都可以)的最小外接矩形,那么点集 cnt 存放的就是该四边形的4个顶点坐标(点集里面有4个点) cnt = np.array([[x1,y1],[x2,y2],[x3,y3],[x4,y4]]) # 必须是array数组的形式 rect = cv2.minAreaRect(
-
python3+openCV 获取图片中文本区域的最小外接矩形实例
我就废话不多说了,大家还是直接看代码吧! print("thresh =",thresh) coords = np.column_stack(np.where(thresh > 0))//获取thresh二值灰度图片中的白色文字区域的点 print("coords =",coords) min_rect = cv2.minAreaRect(coords)//由点集获取最小矩形(包含中心坐标点.宽和高.偏转角度) print("min_rec =&qu
-
python四个坐标点对图片区域最小外接矩形进行裁剪
在图像裁剪操作中,opencv和pillow两个库都具有相应的函数,但是这两个库中的函数仅仅能对与图片平行的矩形进行裁剪操作,如果想要对目标的最小外接矩形进行裁剪该如何操作呢?如下所示: 具体处理该问题的思路如下: 计算最小外接矩形的四个点的坐标,旋转角度 将原图像进行旋转,旋转角度为最小外接矩形的角度 将四个点的坐标进行映射,求出被旋转后图像的四个点的坐标 利用这四个点对图像进行裁剪 图像原图如下: 1 求出该区域的最小外接矩形,并且得到外接矩形的四个点的坐标和旋转角度. rect = cv2
-
Opencv绘制最小外接矩形、最小外接圆
Opencv中求点集的最小外结矩使用方法minAreaRect,求点集的最小外接圆使用方法minEnclosingCircle. minAreaRect方法原型: RotatedRect minAreaRect( InputArray points ); 输入参数points是所要求最小外结矩的点集数组或向量: minEnclosingCircle方法原型: void minEnclosingCircle( InputArray points, CV_OUT Point2f& center, C
-
Opencv实现最小外接矩形和圆
本文实例为大家分享了Opencv实现最小外接矩形和圆的具体代码,供大家参考,具体内容如下 步骤:将一幅图像先转灰度,再canny边缘检测得到二值化边缘图像,再寻找轮廓,轮廓是由一系列点构成的,要想获得轮廓的最小外接矩形,首先需要得到轮廓的近似多边形,用道格拉斯-普克抽稀(DP)算法,道格拉斯-普克抽稀算法,是将曲线近似表示为一系列点,并减少点的数量的一种算法. 该算法实现抽稀的过程是: 1)对曲线的首末点虚连一条直线,求曲线上所有点与直线的距离,并找出最大距离值dmax,用dmax与事先给定的阈
-
Python实现图片查找轮廓、多边形拟合、最小外接矩形代码
1.概述 经常用到轮廓查找和多边形拟合等opencv操作,因此记录以备后续使用.本文代码中的阈值条件对图片没有实际意义,仅仅是为了测试. 原图为: 2.测试代码: import cv2 import numpy as np img = cv2.imread('/home/yasin/coffe.jpg') img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, contours, hierarchy = cv2.findContours(img_g
-
Opencv获取身份证号码区域的示例代码
记得应该是16年的时候,从一个公开课看到了关于OCR方面的内容,里面讲到了通过OpenCV对身份证号码区域的剪裁以及使用Tess-Two进行文字识别,实现了对身份证号码的识别功能. 断断续续看了点关于OpenCV的资料,感觉不是这个专业的真难看懂,各种公式各种名词.今天主要用于做个记录,那个一直碎碎念的东西终于完成了! 原理 我理解的原理(除去文字识别): 对图片进行降噪以及二值化,凸显内容区域 对图片进行轮廓检测 对轮廓结果进行分析 剪裁指定区域 代码实现 本文采用VS2017实现,代码如下:
-
OpenCV实现绘制轮廓外接矩形
目录 1.寻找轮廓 2.绘制轮廓外接矩形 3.代码 1.寻找轮廓 api void cv::findContours( InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point() 各个参数详解如下: Image表示输入图像,必须是二值图像,二值图像可以threshold输出.Canny输出.inRange输出.自适
-
python3+opencv3识别图片中的物体并截取的方法
如下所示: 运行环境:python3.6.4 opencv3.4.0 # -*- coding:utf-8 -*- """ Note: 使用Python和OpenCV检测图像中的物体并将物体裁剪下来 """ import cv2 import numpy as np # step1:加载图片,转成灰度图 image = cv2.imread("353.jpg") gray = cv2.cvtColor(image, cv2.C
-
Python+OpenCV实现旋转文本校正方式
假设我们有一幅图像,图像中的文本被旋转了一个未知的角度.为了对文字进行角度的校正,我们需要完成如下几个步骤: 1.检测出图中的文本范围 2.计算出文本被旋转的角度 3.将图像旋转特定的角度 第一步.读取图像,并做二值化处理 #读取图像,做二值化处理 img = cv.imread('img/imageTextR.png') gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) cv.imshow('gray', gray) #像素取反,变成白字黑底 # gray