Python OpenCV 图像矫正的原理实现
目录
- 题目描述
- 基本思路
- 核心代码
题目描述
目录hw1下的图像是一些胶片的照片,请将其进行度量矫正。
推荐流程:采用Canny算子,检测边缘点;采用Hough直线检测,根据边缘点检测胶片边缘对应的4条直线;4条直线在图像平面中的交点为胶片图像的4个顶点。根据4个顶点与真实世界中胶片的位置(假设胶片图像长宽比为4:3),得到两个平面之间的单应变换矩阵,并根据单应变换矩阵实现图像矫正。
基本思路
使用Canny算子,检测边缘点;以边缘点作为输入,采用Hough直线检测,检测出最多点共线的四条直线,这四条直线的交点就是照片中屏幕的四个顶点;假设胶片图像长宽比为4:3,那么此时已知四个匹配的点,可以求解出两个平面之间的单应变换矩阵;从而可以使用原图像、单应变换矩阵,对原图像进行变换,即可实现图像矫正。实现日志
Canny边缘检测:Python OpenCV Canny边缘检测算法的原理实现详解
Hough直线检测:Python OpenCV Hough直线检测算法的原理实现
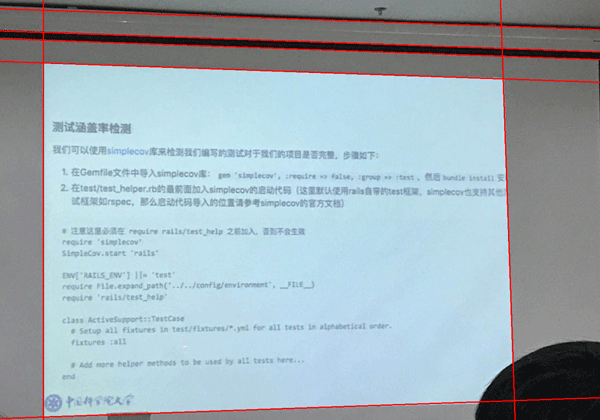
在具体实现时,发现对于给定的图像,几乎不可能通过调整阈值的方式,使得Hough检测到的直线刚好是屏幕边框。经过多轮调整,在下界为180、上界为260时取得了较为理想的结果,
如下图所示:
对于三张图像,经过实验,最终选择的最佳阈值为:
correct('images/1.jpeg', 180, 260)
correct('images/2.jpeg', 30, 100)
correct('images/3.jpeg', 100, 160)
但即便是最佳阈值,也无法做到仅检测出四条线。思考过后,决定加入一步人工筛选。
有两种可行的技术方案:
- 人工筛选直线
- 人工筛选交点
考虑到如果筛选交点的话,工作量明显比筛选直线更大,所以选择人工筛选直线。后面有时间的话考虑加入图形化界面,目前因时间原因,选择专注于算法本身,暂不考虑可视化编程。
直接显示出下图用于筛选:
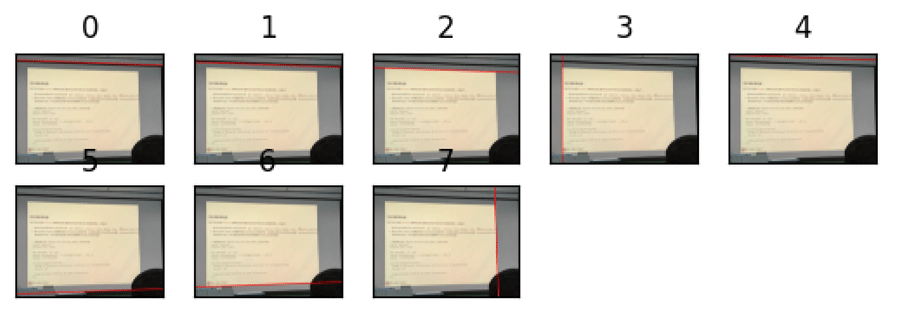
这里符合条件的直线id为2、3、6、7。
求解得到的交点:
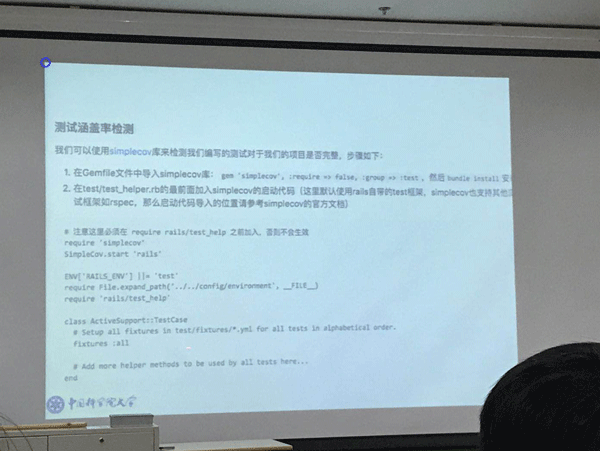
我们假设目标图像是4:3的,也就是其大小为(800, 600),从而我们可以确定目标图像中四个关键点位置为[0, 0], [800, 0], [0, 600], [800, 600]。为了保证交点与目标点一一对应,最为高效的解决方案是,我们筛选图像的时候,按照上、左、下、右的顺序即可。
核心代码
def correct(image_path, threshold1, threshold2):
# 读取图像并转换为灰度图像
image = cv2.imread(image_path)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 使用Canny算子检测边缘
edges = canny_detect(gray, threshold1, threshold2, show=False)
# 使用Hough检测直线
lines = hough_detect(image, edges, show=False)
# 手动筛选
for id, line in enumerate(lines):
rho, theta = line[0]
x1, y1, x2, y2 = convert_polar_to_two_points(rho, theta)
temp_image = image.copy()
cv2.line(temp_image, (x1, y1), (x2, y2), (255, 0, 0), 7)
plt.subplot(5, 5, id + 1)
plt.imshow(temp_image)
plt.title('{}'.format(id))
plt.xticks([])
plt.yticks([])
plt.show()
choose = input('请输入您选择的直线的id,以空格分隔:').split(' ')
# 求解交点
crossover_points = []
assert len(choose) == 4
for i in range(4):
for j in range(i+1, 4):
rho1, theta1 = lines[int(choose[i])][0]
rho2, theta2 = lines[int(choose[j])][0]
# 如果角度差太小,认为它们是平行线
if abs(theta2 - theta1) > np.pi / 8 and abs(theta2 - theta1) < np.pi * 7 / 8:
crossover_points.append(cal_crossover(rho1, theta1, rho2, theta2))
# 确定变换前后的坐标
before = np.float32(crossover_points)
after = np.float32([[0, 0], [800, 0], [0, 600], [800, 600]])
# 单应变换
h = cv2.getPerspectiveTransform(before, after)
result = cv2.warpPerspective(image, h, (800, 600))
cv2.imwrite(image_path.split('.')[0] + '_correct.jpeg', result)
return result
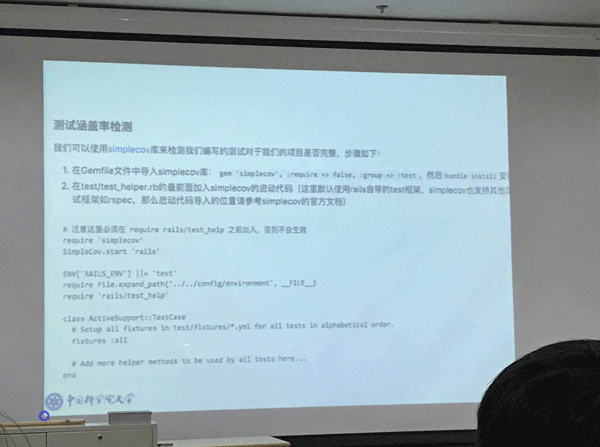
矫正结果:
到此这篇关于Python OpenCV 图像矫正的原理实现的文章就介绍到这了,更多相关Python OpenCV 图像矫正内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Python OpenCV实现任意角度二维码矫正
目录 前言 一般图片矫正方式 二维码图片矫正 思路 编码实现 前言 那天听到领导他们在讨论,说要将图片进行个矫正处理,还叫来了算法部的大佬来讨论将要如何处理这个,讨论场面很是激烈 不得不说好奇心是个很神奇的东西,就把我给吸引过去了 我定眼一看,感觉作为JAVA开发的我自己也能进行处理 因为看到了图片后,发现了图片中一个很重要的特征点: 要进行矫正的图片中都会有一个二维码图案,想要矫正的文字和二维码图案是处于同一水平线的. 如下面这个 要把图片中的“水中加点糖”四个字矫正,只需要把二维码矫正就可以
-
python OpenCV的imread不能读取中文路径问题及解决
目录 OpenCV的imread不能读取中文路径问题 OpenCV imread()函数 (从文件加载图像) OpenCV的imread不能读取中文路径问题 import numpy as np import cv2 cv_img = cv2.imdecode(np.fromfile(jpg_path, dtype=np.uint8), -1) # 读取8位图像 OpenCV imread()函数 (从文件加载图像) def imread(filename, flags=None): # rea
-
Python Opencv基于透视变换的图像矫正
本文实例为大家分享了Python Opencv基于透视变换的图像矫正,供大家参考,具体内容如下 一.自动获取图像顶点变换(获取图像轮廓顶点矫正) 图像旋转校正思路如下 1.以灰度图读入2.腐蚀膨胀,闭合等操作3.二值化图像4.获取图像顶点5.透视矫正 #(基于透视的图像矫正) import cv2 import math import numpy as np def Img_Outline(input_dir): original_img = cv2.imread(input_dir)
-
Python OpenCV Canny边缘检测算法的原理实现详解
目录 Gaussian smoothing Computing the gradient magnitude and orientation Non-maxima suppression Hysteresis thresholding OpenCV实现 Gaussian smoothing 总的来说,Canny边缘检测可以分为四个步骤: 由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声.具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理. Computing the gra
-
使用python opencv对畸变图像进行矫正的实现
代码: __Author__ = "Shliang" __Email__ = "shliang0603@gmail.com" import os import cv2 import numpy as np from tqdm import tqdm def undistort(frame): fx = 685.646752 cx = 649.107905 fy = 676.658033 cy = 338.054431 k1, k2, p1, p2, k3 = -0.
-
Python OpenCV Hough直线检测算法的原理实现
目录 直线检测原理 OpenCV实现 直线检测原理 核心要点:图像坐标空间.参数空间.极坐标参数空间 -> (极坐标)参数空间表决 给定一个点,我们一般会写成y=ax+b的形式,这是坐标空间的写法:我们也可以写成b=-xa+y的形式,这是参数空间的写法.也就是说,给定一个点,那么经过该点的直线的参数必然满足b=-xa+y这一条件,也就是必然在参数空间中b=-xa+y这条直线上.如果给定两个点,那么这两点确定的唯一的直线的参数,就是参数空间中两条参数直线的交点. 由于上述写法不适合处理水平或垂直的
-
Python+OpenCV实现图像识别替换功能详解
OpenCV-Python是一个Python库,旨在解决计算机视觉问题. OpenCV是一个开源的计算机视觉库,1999年由英特尔的Gary Bradski启动.Bradski在访学过程中注意到,在很多优秀大学的实验室中,都有非常完备的内部公开的计算机视觉接口.这些接口从一届学生传到另一届学生,对于刚入门的新人来说,使用这些接口比重复造轮子方便多了.这些接口可以让他们在之前的基础上更有效地开展工作.OpenCV正是基于为计算机视觉提供通用接口这一目标而被策划的. 安装opencv pip3 in
-
Python OpenCV 图像矫正的原理实现
目录 题目描述 基本思路 核心代码 题目描述 目录hw1下的图像是一些胶片的照片,请将其进行度量矫正. 推荐流程:采用Canny算子,检测边缘点:采用Hough直线检测,根据边缘点检测胶片边缘对应的4条直线:4条直线在图像平面中的交点为胶片图像的4个顶点.根据4个顶点与真实世界中胶片的位置(假设胶片图像长宽比为4:3),得到两个平面之间的单应变换矩阵,并根据单应变换矩阵实现图像矫正. 基本思路 使用Canny算子,检测边缘点:以边缘点作为输入,采用Hough直线检测,检测出最多点共线的四条直线,
-
Python+OpenCV人脸检测原理及示例详解
关于opencv OpenCV 是 Intel 开源计算机视觉库 (Computer Version) .它由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法. OpenCV 拥有包括 300 多个 C 函数的跨平台的中.高层 API .它不依赖于其它的外部库 -- 尽管也可以使用某些外部库. OpenCV 对非商业应用和商业应用都是免费 的.同时 OpenCV 提供了对硬件的访问,可以直接访问摄像头,并且 opencv 还提供了一个简单的 GUI(graph
-
python opencv实现图像矫正功能
本文实例为大家分享了python opencv实现图像矫正的具体代码,供大家参考,具体内容如下 问题简介 一般的我们对图像中的目标进行分析和检测时,往往目标具有一定的倾斜角度,自然环境中正面向我们的目标实际是很少的,那将这些倾斜的目标“扶正”的过程就就叫做图像矫正. 透视变换demo 图像矫正使用的主要技术是透视变换.python-opencv 透视变换demo如下: import cv2 import numpy as np img = cv2.imread('/home/pzs/图片/1.j
-
Python+OpenCV实现图像融合的原理及代码
根据导师作业安排,在学习数字图像处理(刚萨雷斯版)第六章 彩色图像处理 中的彩色模型后,导师安排了一个比较有趣的作业: 融合原理为: 1 注意:遥感原RGB图image和灰度图Grayimage为测试用的输入图像: 2 步骤:(1)将RGB转换为HSV空间(H:色调,S:饱和度,V:明度): (2)用Gray图像诶换掉HSV中的V: (3)替换后的HSV转换回RGB空间即可得到结果. 书上只介绍了HSI彩色模型,并没有说到HSV,所以需要网上查找资料. Python代码如下: import cv
-
python opencv图像处理(素描、怀旧、光照、流年、滤镜 原理及实现)
图像素描特效 图像素描特效主要经过以下几个步骤: 调用cv.cvtColor()函数将彩色图像灰度化处理: 通过cv.GaussianBlur()函数实现高斯滤波降噪: 边缘检测采用Canny算子实现: 最后通过cv.threshold()反二进制阈值化处理实现素描特效. #coding:utf-8 import cv2 as cv import numpy as np #读取原始图像 img = cv.imread('d:/paojie.png') #图像灰度处理 gray = cv.cvtC
-
opencv+python实现图像矫正
本文实例为大家分享了opencv+python实现图像矫正的具体代码,供大家参考,具体内容如下 需求:将斜着拍摄的文本图像进行矫正 python代码 import numpy as np import cv2 as cv def shape_correction(img): (height, width) = img.shape[:2] print(img.shape) img_gau = cv.GaussianBlur(img, (5, 5), 0) canny
-
python opencv之SURF算法示例
本文介绍了python opencv之SURF算法示例,分享给大家,具体如下: 目标: SURF算法基础 opencv总SURF算法的使用 原理: 上节课使用了SIFT算法,当时这种算法效率不高,需要更快速的算法.在06年有人提出了SURF算法"加速稳定特征",从名字上来看,他是SIFT算法的加速版本. (原文) 在SIFT算法当中使用高斯差分方程(Difference of Gaussian)对高斯拉普拉斯方程( Laplacian of Gaussian)进行近似.然而,SURF使