OpenCV 光流Optical Flow示例
目录
- 目标
- 光流
- OpenCV 中的 Lucas-Kanade 光流
- OpenCV 中的密集光流
目标
在本章中,将学习:
- 使用 Lucas-Kanade 方法理解光流的概念及其估计
- 使用
cv2.calcOpticalFlowPyrLK()等函数来跟踪视频中的特征点 - 使用
cv2.calcOpticalFlowFarneback()方法创建一个密集的光流场
光流
光流是由物体或相机的运动引起的图像物体在两个连续帧之间的明显运动的模式。它是二维向量场,其中每个向量都是一个位移向量,显示点从第一帧到第二帧的移动。如下图所示。
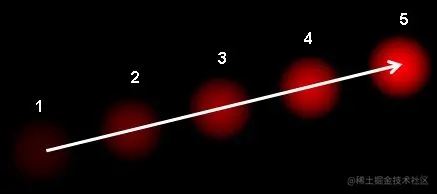
它显示了一个球在连续 5 帧中移动。箭头表示其位移矢量。光流在以下领域有许多应用:
- 运动结构
- 视频压缩
- 视频稳定
- ...
光流基于以下几个假设:
- 对象的像素强度在连续帧之间不会改变
- 相邻像素具有相似的运动
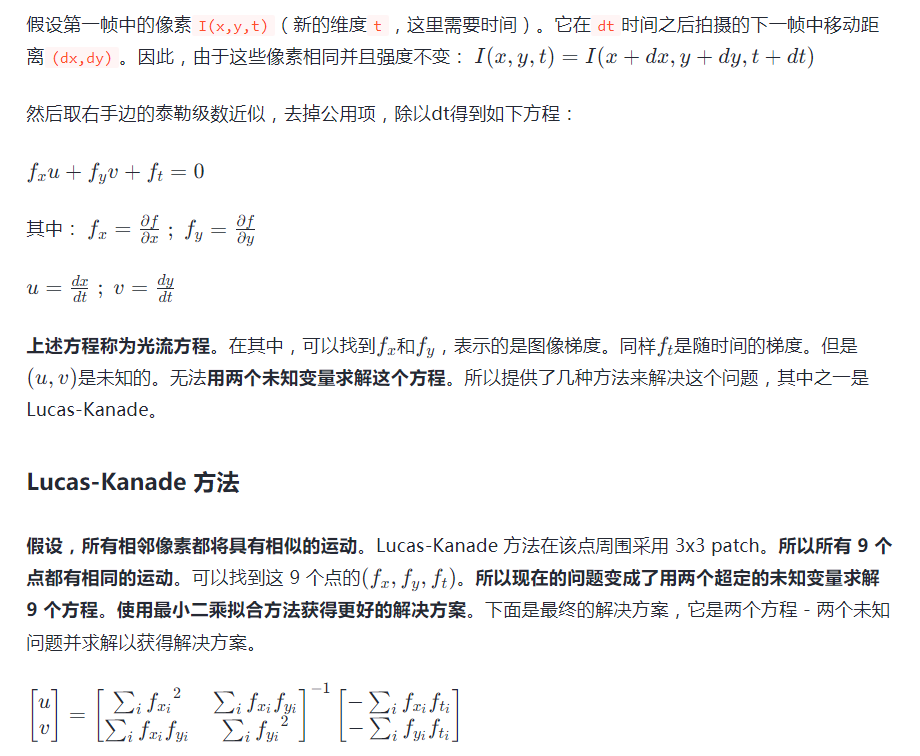
(用 Harris 角点检测器检查逆矩阵的相似性。它表示角点是更好的跟踪点。)
所以从用户的角度来看,这个想法很简单,给出了一些要追踪的要点,收到了这些点的光学流量矢量。但是,还有一些问题。到目前为止,正在处理的是小的动作,因此当有很大的动作时它失败了。要处理这一点,需要使用金字塔。当在金字塔上采样时,会消除小型动作,大的运动会变小。因此,通过在那里应用Lucas-Kanade,将光流与缩放合在一起了。
OpenCV 中的 Lucas-Kanade 光流
OpenCV的cv2.calcOpticalFlowPyrLK() 提供了所有这些功能。下面创建一个简单的应用程序来跟踪视频中的某些点。为了确定点,使用cv2.goodFeaturesToTrack()。取第一帧,检测其中的一些 Shi-Tomasi 角点,然后使用 Lucas-Kanade 光流迭代跟踪这些点。对于函数cv2.calcOpticalFlowPyrLK(),传递前一帧、前面的点和下一帧。它返回之后的点以及一些状态编号,如果找到之后的点,则值为 1,否则为零。在下一步中迭代地将这些点作为前面的点传递,迭代进行。
import cv2
import numpy as np
video_file = 'slow_traffic_small.mp4'
cap = cv2.VideoCapture(video_file)
# params for ShiTomasi corner detection
feature_params = dict( maxCorners = 100,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 )
# Parameters for lucas kanade optical flow
lk_params = dict(
winSize = (15, 15),
maxLevel = 2,
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# create some random colors
color = np.random.randint(0, 255, (100, 3))
# Take first frame and find corners in it
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# create a mask image for drawing purpose
mask = np.zeros_like(old_frame)
while True:
ret, frame = cap.read()
if ret:
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# calculate optical flow
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# Select good points
if p1 is not None:
good_new = p1[st==1]
good_old = p0[st==1]
# draw the tracks
for i,(new, old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel()
c, d = old.ravel()
mask = cv2.line(mask, (int(a), int(b)), (int(c), int(d)), color[i].tolist(), 2)
frame = cv2.circle(frame, (int(a), int(b)), 5, color[i].tolist(), -1)
img = cv2.add(frame,mask)
cv2.imshow('frame',img)
k = cv2.waitKey(30) & 0xff
if k == 27:
cv2.destroyAllWindows()
break
# Now update the previous frame and previous points
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1,1,2)
else:
cv2.destroyAllWindows()
break
上述代码没有检查下一个关键点的正确程度。因此,即使图像中任何一个特征点消失,光流也有可能找到下一个看起来可能靠近它的点。实际上, 对于稳健的跟踪,角点应该在特定的时间间隔内检测点。OpenCV sample提出了这样一个例子,它每 5 帧找到一次特征点,还运行对光流点的向后检查,只选择好的点 )。代码见(github.com/opencv/open…)
结果如下:

OpenCV 中的密集光流
Lucas-Kanade 方法计算稀疏特征集的光流(在示例中,使用 Shi-Tomasi 算法检测到的角点)。OpenCV 提供了另一种算法来寻找密集光流。它计算帧中所有点的光流。它基于 Gunner Farneback 的算法,该算法在 Gunner Farneback 于 2003 年在“Two-Frame Motion Estimation Based on Polynomial Expansion”中进行了解释。
下面的示例显示了如何使用上述算法找到密集光流。首先得到一个带有光流向量(u,v)(u,v)(u,v)的 2通道向量,找到它们的大小和方向。对结果进行颜色编码以实现更好的可视化。方向对应于图像的色调值(Hue),幅度对应于值屏幕。代码如下:
import cv2
import numpy as np
cap = cv2.VideoCapture("vtest.avi")
ret, frame1 = cap.read()
frame1_gray = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(frame1)
hsv[...,1] = 255
while(1):
ret, frame2 = cap.read()
if ret:
frame2_gray = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
flow = cv2.calcOpticalFlowFarneback(frame1_gray, frame2_gray, None, 0.5, 3, 15, 3, 5, 1.2, 0)
mag, ang = cv2.cartToPolar(flow[...,0], flow[...,1])
hsv[...,0] = ang*180/np.pi/2
hsv[...,2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('frame2', bgr)
k = cv2.waitKey(30) & 0xff
if k == 27:
cv2.destroyAllWindows()
break
elif k == ord('s'):
cv2.imwrite('opticalfb.png',frame2)
cv2.imwrite('opticalhsv.png',bgr)
frame1_gray = frame2_gray
else:
cv2.destroyAllWindows()
break

附加资源
- docs.opencv.org/4.1.2/d4/de…
- cv2.calcOpticalFlowPyrLK()
- cv.calcOpticalFlowFarneback()
- en.wikipedia.org/wiki/Optica…
以上就是OpenCV 光流Optical Flow示例的详细内容,更多关于OpenCV 光流Optical Flow的资料请关注我们其它相关文章!
相关推荐
-
OpenCV立体图像深度图Depth Map基础
目录 目标 基础 代码 目标 在本节中,将学习 根据立体图像创建深度图 基础 在上一节中,看到了对极约束和其他相关术语等基本概念.如果有两个场景相同的图像,则可以通过直观的方式从中获取深度信息.下面是一张图片和一些简单的数学公式证明了这种想法. 上图包含等效三角形.编写它们的等式将产生以下结果: xxx和x′x'x′是图像平面中与场景点3D相对应的点与其相机中心之间的距离.BBB是两个摄像机之间的距离(已知),fff是摄像机的焦距(已知).简而言之,上述方程式表示场景中某个点的深度与相应图像点及
-
OpenCV目标检测Meanshif和Camshift算法解析
目录 学习目标 Meanshift OpenCV中的Meanshift Camshift OpenCV中的Camshift 附加资源 学习目标 在本章中,将学习用于跟踪视频中对象的Meanshift和Camshift算法 Meanshift Meanshift背后的原理很简单,假设有点的集合(它可以是像素分布,例如直方图反投影). 给定一个小窗口(可能是一个圆形),必须将该窗口移动到最大像素密度(或最大点数)的区域.如下图所示: 初始窗口以蓝色圆圈显示,名称为“C1”.其原始中心以蓝色矩形标记,
-
OpenCV之理解KNN邻近算法k-Nearest Neighbour
目录 目标 理论 OpenCV中的kNN 目标 在本章中,将理解 k最近邻(kNN)算法的概念 理论 kNN是可用于监督学习的最简单的分类算法之一.这个想法是在特征空间中搜索测试数据的最近邻.用下面的图片来研究它. 在图像中,有两个族类,蓝色正方形和红色三角形.称每一种为类(Class).他们的房屋显示在他们的城镇地图中,我们称之为特征空间( Feature Space). (可以将特征空间视为投影所有数据的空间.例如,考虑一个2D坐标空间.每个数据都有两个特征,x和y坐标.可以在2D坐标空间中
-

基于Opencv图像识别实现答题卡识别示例详解
目录 1. 项目分析 2.项目实验 3.项目结果 总结 在观看唐宇迪老师图像处理的课程中,其中有一个答题卡识别的小项目,在此结合自己理解做一个简单的总结. 1. 项目分析 首先在拿到项目时候,分析项目目的是什么,要达到什么样的目标,有哪些需要注意的事项,同时构思实验的大体流程. 图1. 答题卡测试图像 比如在答题卡识别的项目中,针对测试图片如图1 ,首先应当实现的功能是: 能够捕获答题卡中的每个填涂选项. 将获取的填涂选项与正确选项做对比计算其答题正确率. 2.项目实验 在对测试图像进行形态学操
-
OpenCV使用KNN完成OCR手写体识别
目录 目标 手写数字的OCR 也可以用来预测单个数字 英文字母的OCR 目标 在本章中,将学习 使用kNN来构建基本的OCR应用程 使用OpenCV自带的数字和字母数据集 手写数字的OCR 目标是构建一个可以读取手写数字的应用程序.为此,需要一些 train_data 和test_data .OpenCV git项目中有一个图片 digits.png (opencv/samples/data/ 中),其中包含 5000 个手写数字(每个数字500个),每个数字都是尺寸大小为 20x20 的图像.
-
python OpenCV实现图像特征匹配示例详解
目录 目标 Brute-Force匹配器的基础 使用ORB描述符进行Brute-Force匹配 什么是Matcher对象? 带有SIFT描述符和比例测试的Brute-Force匹配 基于匹配器的FLANN 目标 在本章中,将学习: 如何将一个图像中的特征与其他图像进行匹配 在OpenCV中使用Brute-Force匹配器和FLANN匹配器 Brute-Force匹配器的基础 暴力匹配器很简单.它使用第一组中一个特征的描述符,并使用一些距离计算将其与第二组中的所有其他特征匹配.并返回最接近的一个.
-
OpenCV特征匹配和单应性矩阵查找对象详解
目录 目标 基础 实现 附加资源 目标 在本章中,将学习 将从Calib3D模块中混淆特征匹配和找到(单应性矩阵)homography,以查找复杂图像中的已知对象. 基础 在之前的内容中,使用了一个query image,在其中找到了一些特征点,拍摄了另一张train image,也在该图像中找到了特征,找到了其中最好的匹配.简而言之,在另一张杂乱的图像中找到了物体某些部分的位置.该信息足以准确地在train image上找到对象. 为此,可以使用calib3d模块的函数,即cv2.findHo
-
python opencv之SURF算法示例
本文介绍了python opencv之SURF算法示例,分享给大家,具体如下: 目标: SURF算法基础 opencv总SURF算法的使用 原理: 上节课使用了SIFT算法,当时这种算法效率不高,需要更快速的算法.在06年有人提出了SURF算法"加速稳定特征",从名字上来看,他是SIFT算法的加速版本. (原文) 在SIFT算法当中使用高斯差分方程(Difference of Gaussian)对高斯拉普拉斯方程( Laplacian of Gaussian)进行近似.然而,SURF使
-
python opencv之SIFT算法示例
本文介绍了python opencv之SIFT算法示例,分享给大家,具体如下: 目标: 学习SIFT算法的概念 学习在图像中查找SIFT关键的和描述符 原理: (原理部分自己找了不少文章,内容中有不少自己理解和整理的东西,为了方便快速理解内容和能够快速理解原理,本文尽量不使用数学公式,仅仅使用文字来描述.本文中有很多引用别人文章的内容,仅供个人记录使用,若有错误,请指正出来,万分感谢) 之前的harris算法和Shi-Tomasi 算法,由于算法原理所致,具有旋转不变性,在目标图片发生旋转时依然
-
python opencv之分水岭算法示例
本文介绍了python opencv之分水岭算法示例,分享给大家,具体如下: 目标 使用分水岭算法对基于标记的图像进行分割 使用函数cv2.watershed() 原理: 灰度图像可以被看成拓扑平面,灰度值高的区域可以看出山峰,灰度值低的区域可以看成是山谷.向每一个山谷当中灌不同颜色的水.水位升高,不同山谷的水会汇合,为防止不同山谷的水汇合,小在汇合处建立起堤坝.然后继续灌水,然后再建立堤坝,直到山峰都掩模.构建好的堤坝就是图像的分割. 此方法通常会得到过渡分割的结果,因为图像中的噪声以及其他因
-
Opencv对象追踪的示例代码
1 HSV上下限 颜色的HSV上下限如下表: 2 追踪单个颜色 import cv2 as cv import numpy as np cap = cv.VideoCapture(0) lower_color = np.array([0, 43, 46]) upper_color = np.array([10, 255, 255]) while cap.isOpened(): # 读取帧 _, frame = cap.read() # 转换颜色空间 BGR 到 HSV hsv = cv.cvtC
-
OpenCV 绘制同心圆的示例代码
目录 功能函数 测试代码 最近在学习OpenCV,本文主要介绍了OpenCV 绘制同心圆的示例代码,分享给大家,具体如下: 功能函数 // 绘制同心圆 void DrawConcentricCircle(cv::Mat mask, const cv::Point2i ¢er, int radius1,int radius2, const cv::Scalar &color, int thickness,int linetype) { // 创建画布 cv::Mat canvas =
-
python计算机视觉opencv卡号识别示例详解
目录 一.模板预处理 1.将模板设置为二值图 2.检测模板的轮廓 3.对模板轮廓排序,并将数字和轮廓一一对应,以字典存储 4.备注 二.图片预处理 1.初始化卷积核 2.图片预处理第一部分 3.图像预处理第二部分 三.轮廓处理 1.大轮廓过滤 2.小轮廓分割 模板图片如下: 需识别的图片如下: 一.模板预处理 1.将模板设置为二值图 2.检测模板的轮廓 3.对模板轮廓排序,并将数字和轮廓一一对应,以字典存储 排序的函数如下: 排序并存储: 4.备注 ①每一个数字对应的是二值图截出来的那个数字图的
-
OpenCV实现相机标定示例详解
目录 环境准备 相机标定 棋盘格图片 实时显示相机的画面 在线标定 实时显示相机画面,按键保存能检测到角点的 棋盘格图片 离线标定 畸变矫正 环境准备 vs2015+opencv4.10安装与配置 相机标定 棋盘格图片 可以自己生成,然后打印到A4纸上.(也可以去TB买一块,平价买亚克力板的,不反光买氧化铝材质,高精度买陶瓷的) /** * 生成棋盘格图片 **/ int generateCalibrationPicture() { //Mat frame = imread("3A4.bmp&q
-
Python OpenCV图像颜色变换示例
目录 给图像添加颜色 图像按位操作 图像的通道操作 给图像添加颜色 在使用OpenCV操作图像时,有时候需要给图像添加不同的颜色,以达到不同的风格效果.这里介绍的主要是opencv中的cv.applyColorMap()函数. 给图像应用颜色函数cv.applyColorMap(src, colormap, dst=None)src:表示传入的原图:colormap:颜色图类型(17种).可以单独使用,也可以以一个列表的形式批量使用. 以下图举例实现: 直接上代码: # -*-coding:ut
-
Python OpenCV实现图形检测示例详解
目录 1. 轮廓识别与描绘 1.1 cv2.findComtours()方法 1.2 cv2.drawContours() 方法 1.3 代码示例 2. 轮廓拟合 2.1 矩形包围框拟合 - cv2.boundingRect() 2.2圆形包围框拟合 - cv2.minEnclosingCircle() 3. 凸包 绘制 4. Canny边缘检测 - cv2.Canny() 4.1 cv2.Canny() 用法简介 4.2 代码示例 5. 霍夫变换 5.1 概述 5.2 cv2.HoughLin
-
python目标检测基于opencv实现目标追踪示例
目录 主要代码 信息封装类 更新utils python-opencv3.0新增了一些比较有用的追踪器算法,这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 主要代码 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视者模块,负责入侵检测,目标跟踪 ''' class WatchDo