基于Python和openCV实现图像的全景拼接详细步骤
基本介绍
图像的全景拼接,即“缝合”两张具有重叠区域的图来创建一张全景图。其中用到了计算机视觉和图像处理技术有:关键点检测、局部不变特征、关键点匹配、RANSAC(Random Sample Consensus,随机采样一致性)和透视变形。
具体步骤
(1)检测左右两张图像的SIFT关键特征点,并提取局部不变特征 ;
(2)使用knnMatch检测来自右图(左图)的SIFT特征,与左图(右图)进行匹配 ;
(3)计算视角变换矩阵H,用变换矩阵H对右图进行扭曲变换;
(4)将左图(右图)加入到变换后的图像的左侧(右侧)获得最终图像;
import cv2 as cv # 导入opencv包
import numpy as np # 导入numpy包,图像处理中的矩阵运算需要用到
# 检测图像的SIFT关键特征点
def sift_keypoints_detect(image):
# 处理图像一般很少用到彩色信息,通常直接将图像转换为灰度图
gray_image = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
# 获取图像特征sift-SIFT特征点,实例化对象sift
sift = cv.xfeatures2d.SIFT_create()
# keypoints:特征点向量,向量内的每一个元素是一个KeyPoint对象,包含了特征点的各种属性信息(角度、关键点坐标等)
# features:表示输出的sift特征向量,通常是128维的
keypoints, features = sift.detectAndCompute(image, None)
# cv.drawKeyPoints():在图像的关键点部位绘制一个小圆圈
# 如果传递标志flags=cv.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,它将绘制一个大小为keypoint的圆圈并显示它的方向
# 这种方法同时显示图像的坐标,size和方向,是最能显示特征的一种绘制方式
keypoints_image = cv.drawKeypoints(
gray_image, keypoints, None, flags=cv.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS)
# 返回带关键点的图像、关键点和sift的特征向量
return keypoints_image, keypoints, features
# 使用KNN检测来自左右图像的SIFT特征,随后进行匹配
def get_feature_point_ensemble(features_right, features_left):
# 创建BFMatcher对象解决匹配
bf = cv.BFMatcher()
# knnMatch()函数:返回每个特征点的最佳匹配k个匹配点
matches = bf.knnMatch(features_right, features_left, k=2) # des1为模板图,des2为匹配图
# 利用sorted()函数对matches对象进行升序(默认)操作
matches = sorted(matches, key=lambda x: x[0].distance / x[1].distance)
# x:x[]字母可以随意修改,排序方式按照中括号[]里面的维度进行排序,[0]按照第一维排序,[2]按照第三维排序
# 建立列表good用于存储匹配的点集
good = []
for m, n in matches:
# ratio的值越大,匹配的线条越密集,但错误匹配点也会增多
ratio=0.6
if m.distance < ratio * n.distance:
good.append(m)
return good
# 计算视角变换矩阵H,用H对右图进行变换并返回全景拼接图像
def Panorama_stitching(image_right, image_left):
_, keypoints_right, features_right = sift_keypoints_detect(image_right)
_, keypoints_left, features_left = sift_keypoints_detect(image_left)
goodMatch = get_feature_point_ensemble(features_right, features_left)
# 当筛选项的匹配对大于4对(因为homography单应性矩阵的计算需要至少四个点)时,计算视角变换矩阵
if len(goodMatch) > 4:
# 获取匹配对的点坐标
ptsR = np.float32(
[keypoints_right[m.queryIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ptsL = np.float32(
[keypoints_left[m.trainIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
# ransacReprojThreshold:将点对视为内点的最大允许重投影错误阈值(仅用于RANSAC和RHO方法时),若srcPoints和dstPoints是以像素为单位的,该参数通常设置在1到10的范围内
ransacReprojThreshold = 4
# cv.findHomography():计算多个二维点对之间的最优单映射变换矩阵 H(3行x3列),使用最小均方误差或者RANSAC方法
# 函数作用:利用基于RANSAC的鲁棒算法选择最优的四组配对点,再计算转换矩阵H(3*3)并返回,以便于反向投影错误率达到最小
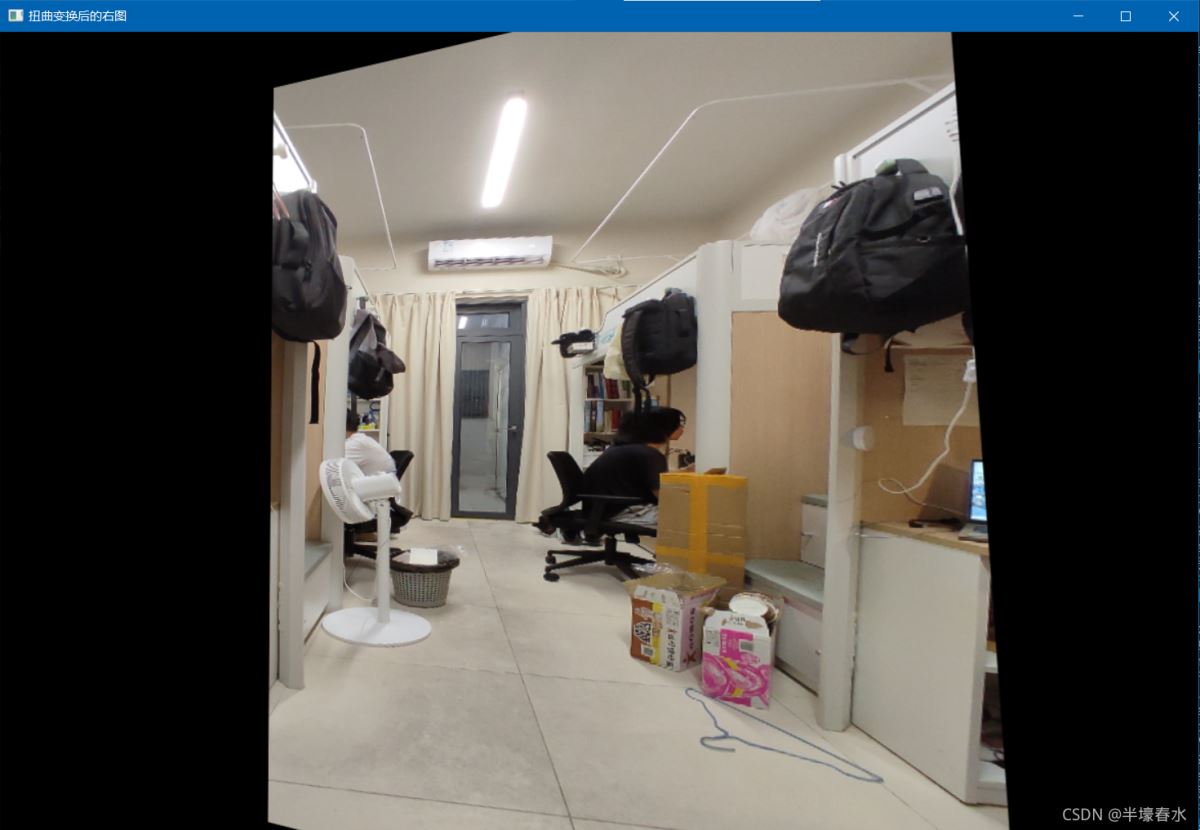
Homography, status = cv.findHomography(
ptsR, ptsL, cv.RANSAC, ransacReprojThreshold)
# cv.warpPerspective():透视变换函数,用于解决cv2.warpAffine()不能处理视场和图像不平行的问题
# 作用:就是对图像进行透视变换,可保持直线不变形,但是平行线可能不再平行
result = cv.warpPerspective(
image_right, Homography, (image_right.shape[1] + image_left.shape[1], image_right.shape[0]))
cv.imshow("扭曲变换后的右图", result)
cv.waitKey(0)
cv.destroyAllWindows()
# 将左图加入到变换后的右图像的左端即获得最终图像
result[0:image_left.shape[0], 0:image_left.shape[1]] = image_left
# 返回全景拼接的图像
return result
if __name__ == '__main__':
# 读取需要拼接的图像,需要注意图像左右的顺序
image_left = cv.imread("./Left.jpg")
image_right = cv.imread("./Right.jpg")
# 通过调用cv2.resize()使用插值的方式来改变图像的尺寸,保证左右两张图像大小一致
# cv.resize()函数中的第二个形参dsize表示输出图像大小尺寸,当设置为0(None)时,则表示按fx与fy与原始图像大小相乘得到输出图像尺寸大小
image_right = cv.resize(image_right, None, fx=0.4, fy=0.24)
image_left = cv.resize(image_left, (image_right.shape[1], image_right.shape[0]))
# 获取检测到关键点后的图像的相关参数
keypoints_image_right, keypoints_right, features_right = sift_keypoints_detect(image_right)
keypoints_image_left, keypoints_left, features_left = sift_keypoints_detect(image_left)
# 利用np.hstack()函数同时将原图和绘有关键点的图像沿着竖直方向(水平顺序)堆叠起来
cv.imshow("左图关键点检测", np.hstack((image_left, keypoints_image_left)))
# 一般在imshow后设置 waitKey(0) , 代表按任意键继续
cv.waitKey(0)
# 删除先前建立的窗口
cv.destroyAllWindows()
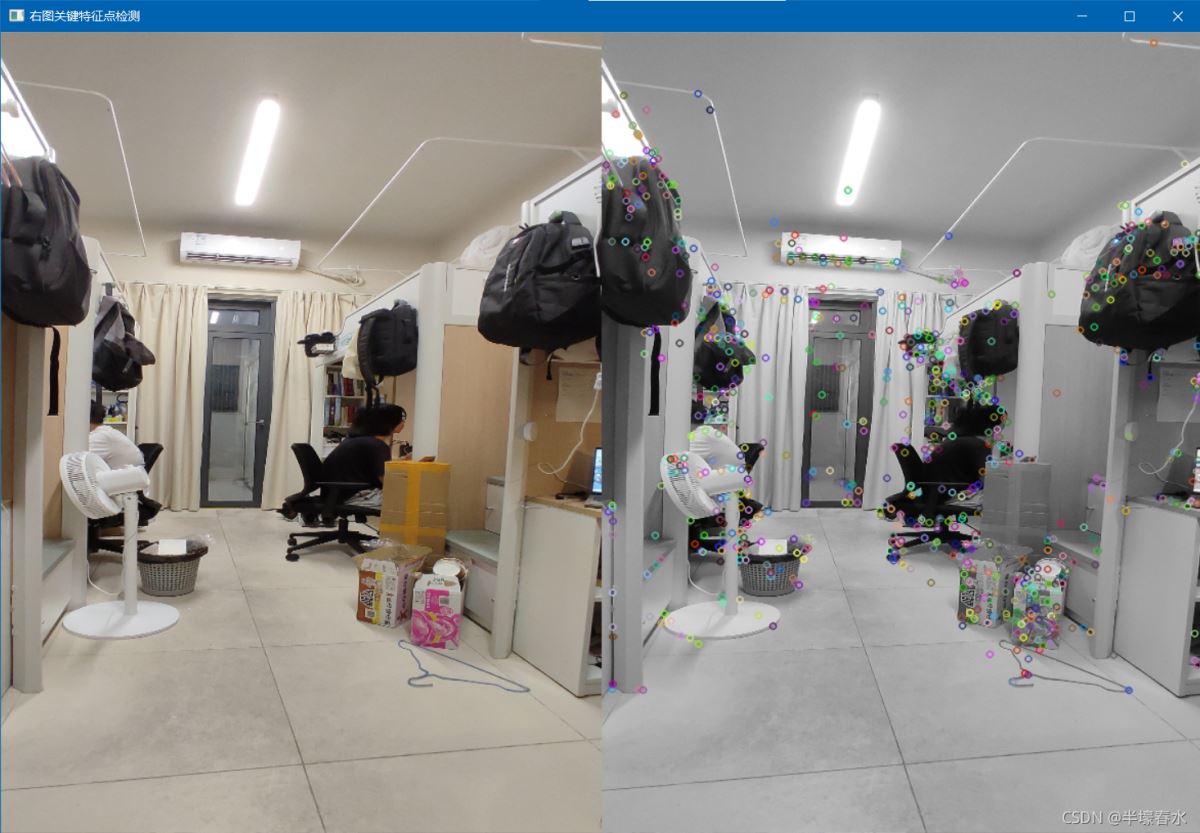
cv.imshow("右图关键点检测", np.hstack((image_right, keypoints_image_right)))
cv.waitKey(0)
cv.destroyAllWindows()
goodMatch = get_feature_point_ensemble(features_right, features_left)
# cv.drawMatches():在提取两幅图像特征之后,画出匹配点对连线
# matchColor – 匹配的颜色(特征点和连线),若matchColor==Scalar::all(-1),颜色随机
all_goodmatch_image = cv.drawMatches(
image_right, keypoints_right, image_left, keypoints_left, goodMatch, None, None, None, None, flags=2)
cv.imshow("所有匹配的SIFT关键特征点连线", all_goodmatch_image)
cv.waitKey(0)
cv.destroyAllWindows()
# 把图片拼接成全景图并保存
result = Panorama_stitching(image_right, image_left)
cv.namedWindow("全景图", cv.WINDOW_AUTOSIZE)
cv.imshow("全景图", result)
cv.imwrite("./全景图.jpg", result)
cv.waitKey(0)
cv.destroyAllWindows()
左图关键特征点检测

右图关键特征点检测
所有匹配的SIFT关键特征点连线

扭曲变换后的右图
全景图

由于输入的左右图像之间有大量重叠,导致全景图的主要添加部分是在拼接图像的右侧,因此会造成拼接后全景图右边大量的黑色空白区域。
到此这篇关于基于Python和openCV实现图像的全景拼接的文章就介绍到这了,更多相关Python openCV实现图像的全景拼接内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
Python+OpenCV实现图像的全景拼接
本文实例为大家分享了Python+OpenCV实现图像的全景拼接的具体代码,供大家参考,具体内容如下 环境:python3.5.2 + openCV3.4 1.算法目的 将两张相同场景的场景图片进行全景拼接. 2.算法步骤 本算法基本步骤有以下几步: 步骤1:将图形先进行桶形矫正 没有进行桶形变换的图片效果可能会像以下这样: 图片越多拼接可能就会越夸张. 本算法是将图片进行桶形矫正.目的就是来缩减透视变换(Homography)之后图片产生的变形,从而使拼接图片变得畸形. 步骤2:特征点匹配 本
-
python opencv进行图像拼接
本文实例为大家分享了python opencv进行图像拼接的具体代码,供大家参考,具体内容如下 思路和方法 思路 1.提取要拼接的两张图片的特征点.特征描述符: 2.将两张图片中对应的位置点找到,匹配起来: 3.如果找到了足够多的匹配点,就能将两幅图拼接起来,拼接前,可能需要将第二幅图透视旋转一下,利用找到的关键点,将第二幅图透视旋转到一个与第一幅图相同的可以拼接的角度: 4.进行拼接: 5.进行拼接后的一些处理,让效果看上去更好. 实现方法 1.提取图片的特征点.描述符,可以使用opencv创
-
python+OpenCV实现图像拼接
本文实例为大家分享了利用python和OpenCV实现图像拼接,供大家参考,具体内容如下 python+OpenCV实现image stitching 在最新的OpenCV官方文档中可以找到C++版本的Stitcher类的说明, 但是python版本的还没有及时更新, 本篇对python版本的实现做一个简单的介绍. 由于官方文档中还没有python版本的Stitcher类的说明, 因此只能自己去GitHub源码上找, 以下是stitching的样例: from __future__ import
-
python opencv 图像拼接的实现方法
初级的图像拼接为将两幅图像简单的粘贴在一起,仅仅是图像几何空间的转移与合成,与图像内容无关.高级图像拼接也叫作基于特征匹配的图像拼接,拼接时消去两幅图像相同的部分,实现拼接合成全景图. 具有相同尺寸的图A和图B含有相同的部分与不同的部分,如图所示: 用基于特征的图像拼接实现后: 设图像高为h,相同部分的宽度为wx 拼接后图像的宽w=wA+wB-wx 因此,可以先构建一个高为h,宽为W*2的空白图像,将左图像向右平移wx,右图像粘贴在右侧.则右图像刚好覆盖左图像中的相同部分
-

基于Python和openCV实现图像的全景拼接详细步骤
基本介绍 图像的全景拼接,即"缝合"两张具有重叠区域的图来创建一张全景图.其中用到了计算机视觉和图像处理技术有:关键点检测.局部不变特征.关键点匹配.RANSAC(Random Sample Consensus,随机采样一致性)和透视变形. 具体步骤 (1)检测左右两张图像的SIFT关键特征点,并提取局部不变特征 : (2)使用knnMatch检测来自右图(左图)的SIFT特征,与左图(右图)进行匹配 : (3)计算视角变换矩阵H,用变换矩阵H对右图进行扭曲变换: (4)将左图(右图)
-
基于Python的OpenCV骨架化图像并显示(skeletonize)
1. 效果图 自己画一张图,原图 VS 骨架效果图如下: opencv logo原图 VS 骨架化效果图如下: 2. 源码 # 图像骨架化~ import cv2 import imutils import numpy as np img = np.zeros((390, 390, 3), dtype="uint8") cv2.putText(img, "Beautiful Girl.....", (50, 190), cv2.FONT_HERSHEY_SIMPLE
-
基于Python实现二维图像双线性插值
目录 插值简介 最近邻法 (Nearest Interpolation) 双三次插值 (Bicubic interpolation) 双线性插值 (Bilinear Interpolation) 双线性插值 python实现 在对二维数据进行 resize / mapping / 坐标转换等操作时,经常会将原本的整数坐标变换为小数坐标,对于非整数的坐标值一种直观有效的插值方式为双线性插值. 插值简介 双线性插值,又称为双线性内插.在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思
-
基于python的opencv图像处理实现对斑马线的检测示例
基本思路 斑马线检测通过opencv图像处理来进行灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀后对图像进行轮廓检测,通过判断车辆和行人的位置,以及他们之间的距离信息,当车速到超过一定阈值时并且与行人距离较近时,则会被判定车辆为未礼让行人. 结果示例 实验流程 先通过视频截取一张图片来进行测试,如果结果满意之后再嵌套到视频中,从而达到想要的效果. 1.预处理(灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀)> 根据自己的需求来修改一些值 #灰度值转换 imgGray = cv2.cvtColor
-
基于python使用OpenCV进行物体轮廓排序
目录 1 引言 2 栗子 2.1 读取图像 2.2 获取轮廓 2.3 轮廓排序 2.4 其他结果 3 总结 1 引言 在进行图像处理过程中,我们经常会遇到一些和物体轮廓相关的操作,比如求目标轮廓的周长面积等,我们直接使用Opencv的findContours函数可以很容易的得到每个目标的轮廓,但是可视化后, 这个次序是无序的,如下图左侧所示: 本节打算实现对物体轮廓进行排序,可以实现从上到下排序或者从左倒右排序,达到上图右侧的可视化结果. 2 栗子 2.1 读取图像 首先,我们来读取图像,并得到
-
python使用opencv resize图像不进行插值的操作
如下所示: def resize(src, dsize, dst=None, fx=None, fy=None, interpolation=None): 如果使用vanilla resize,不改变默认参数,就会对原图像进行插值操作.不关你是扩大还是缩小图片,都会通过插值产生新的像素值. 对于语义分割,target的处理,如果是对他进行resize操作的话.就希望不产生新的像素值,因为他的颜色信息,代表了像素的类别信息. 但是我们有时候希望resize之后不产生新的像素值,而是产生利用最近邻点
-
python 利用opencv实现图像网络传输
本代码主要实现的是利用网络传输图片,用在我的树莓派项目之上.该项目在PC上运行服务端,树莓派上运行客户端,两者连接到同一局域网中,修改代码中的IP地址,就可以实现将树莓派采集到的图像数据实时传输到PC端.先运行服务端代码,然后运行客户端代码即可.树莓派摄像头使用的是普通的USB摄像头,并且在树莓派上安装了opencv,在树莓派上安装opencv的过程可以参考https://www.pyimagesearch.com/2017/09/04/raspbian-stretch-install-open
-
python 用opencv实现图像修复和图像金字塔
我们将学习如何通过一种称为修复的方法去除旧照片中的小噪音,笔画等.基本思路很简单:用相邻像素替换那些坏标记,使其看起来像邻域. cv2.inpaint() cv2.INPAINT_TELEA cv2.INPAINT_NS import numpy as np import cv2 as cv img = cv.imread('messi_2.jpg') mask = cv.imread('mask2.png',0) dst = cv.inpaint(img,mask,3,cv.INPAINT_T
-