opencv-python图像配准(匹配和叠加)的实现
图像配准需是指对不同条件下得到的两幅或多幅图像进行匹配、叠加的过程。最简单的做法就是求得原图像到目标图像之间的透视变换矩阵,将原图像按照矩阵进行变换,就可以得到和目标图像相似的效果。透视变换是将成像投影到一个新的视平面,也称作投影映射。
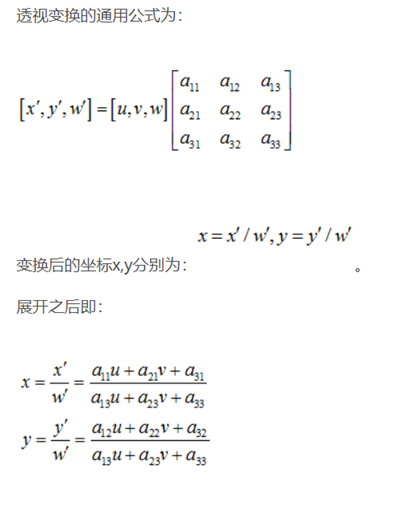
透视变换实质上是将二维的图片变换到三维的坐标系中之后再变换到另一个二维坐标系,与仿射变换相比透视变换实现的效果要多一些。求解精确矩阵和透视变换可以很容易地在opencv-python中实现。
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
original_image = cv.imread("Image A.jpg")
target_image = cv.imread("Image B.jpg")
# 生成透视矩阵
src_points = np.array([[957, 1655], [2177, 1170], [2676, 24], [2487, 1931]], dtype=np.float32)
den_points = np.array([[687, 1150], [2000, 996], [2757, 18], [2098, 1819]], dtype=np.float32)
# getPerspectiveTransform可以得到从点集src_points到点集den_points的透视变换矩阵
T = cv.getPerspectiveTransform(src_points, den_points)
# 进行透视变换
# 注意透视变换第三个参数为变换后图片大小,格式为(高度,宽度)
warp_imgae = cv.warpPerspective(original_image, T, (target_image.shape[1], target_image.shape[0]))
plt.imshow(warp_imgae)
plt.show()
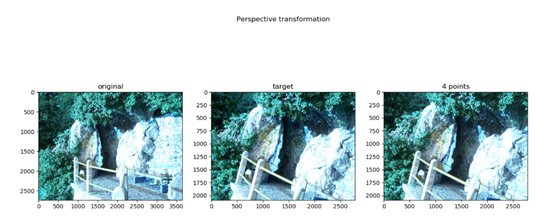
进行四点变换前后的结果为
opencv-python也可以计算超过四个点的两数组点之间的变换矩阵。对原图像选择7个点进行透视变换的结果为
# 设置原始和目标特征点 src_more_point = np.float32([[957, 1655], [2177, 1170], [620, 2586], [1280, 2316], [2487, 1931], [937, 758], [2676, 24]]).reshape(-1, 1, 2) den_more_point = np.float32([[687, 1150], [2000, 996], [121, 1974], [927, 1886], [2098, 1819], [899, 280], [2757, 18]]).reshape(-1, 1, 2) # 调用库函数计算特征矩阵 # cv.findHomography第三个参数为计算单位矩阵所用的方法,0为常规算法,cv.RANSAC为基于RANSAC的鲁棒算法,cv.LMEDS为最小中值 # 鲁棒算法,cv.RHO基于PROSAC的鲁棒算法.第四个参数取值范围在1到10,绝一个点对的阈值。原图像的点经过变换后点与目标图像上对应 # 点的误差.返回值中H为变换矩阵.mask是掩模,在线的点. H, status = cv.findHomography(src_more_point, den_more_point, cv.RANSAC, 5.0) # 进行透视变换 warped_more_point_image = cv.warpPerspective(original_image, H, (target_image.shape[1], target_image.shape[0]))
对4个点、7个点和opencv-python函数库自动匹配的效果对比如下
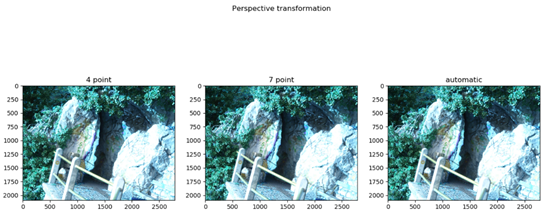
可以看出如果匹配点选择恰当,三种方法的效果并没有太大区别。
调用库函数的图像自动匹配代码如下
# 用AKAZE库函数进行自动特征检测,AKAZE与SIFT等属于相似的 特征检测,但是有一些不同
akaze = cv.AKAZE_create()
# Find the keypoints and descriptors with SIFT
kp1, des1 = akaze.detectAndCompute(original_image_gray, None)
kp2, des2 = akaze.detectAndCompute(target_image_gray, None)
bf = cv.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append([m])
# 画出符合条件的匹配点的连线
img3 = cv.drawMatchesKnn(original_image_gray, kp1, target_image_gray, kp2, good_matches, None, flags=cv.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
cv.imwrite('matches.jpg', img3)
src_automatic_points = np.float32([kp1[m[0].queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
den_automatic_points = np.float32([kp2[m[0].trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
# 调用库函数计算特征矩阵
H, status = cv.findHomography(src_more_point, den_more_point, cv.RANSAC, 5.0)
# 进行透视变换
warped_automatic_image = cv.warpPerspective(original_image, H, (target_image.shape[1], target_image.shape[0]))
# 绘制图像
my_draw(warped_automatic_image, tip='automatic')
到此这篇关于opencv-python图像配准的实现的文章就介绍到这了,更多相关opencv-python图像配准内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

python opencv实现图像配准与比较
本文实例为大家分享了python opencv实现图像配准与比较的具体代码,供大家参考,具体内容如下 代码 from skimage import io import cv2 as cv import numpy as np import matplotlib.pyplot as plt img_path1 = '2_HE_maxarea.png' img_path2 = '2_IHC_maxarea.png' img1 = io.imread(img_path1) img2 = io.imre
-
opencv-python图像配准(匹配和叠加)的实现
图像配准需是指对不同条件下得到的两幅或多幅图像进行匹配.叠加的过程.最简单的做法就是求得原图像到目标图像之间的透视变换矩阵,将原图像按照矩阵进行变换,就可以得到和目标图像相似的效果.透视变换是将成像投影到一个新的视平面,也称作投影映射. 透视变换实质上是将二维的图片变换到三维的坐标系中之后再变换到另一个二维坐标系,与仿射变换相比透视变换实现的效果要多一些.求解精确矩阵和透视变换可以很容易地在opencv-python中实现. import cv2 as cv import numpy as np
-
Python OpenCV实现图像模板匹配详解
目录 1.什么是模板匹配及模板匹配方法matchTemplate() 介绍 素材准备 2.单模板匹配 2.1 单目标匹配 2.2 多目标匹配 3.多模板匹配 1.什么是模板匹配及模板匹配方法matchTemplate() 介绍 提供一个模板图像,一个目标图像,且满足模板图像是目标图像的一部分,从目标图像中寻找特定的模板图像的过程,即为模板匹配.OpenCV提供了matchTemplate()方法帮助我们实现模板匹配. 该方法语法如下: cv2.matchTemplate(image, templ
-
Python+Opencv实现图像模板匹配详解
目录 引言 一.匹配方法 二.匹配单个对象 三.匹配多个对象 引言 什么是模板匹配呢? 看到这里大家是否会觉得很熟悉的感觉涌上心头!在人脸识别是不是也会看见 等等. 模板匹配可以看作是对象检测的一种非常基本的形式.使用模板匹配,我们可以使用包含要检测对象的“模板”来检测输入图像中的对象. 一.匹配方法 cv2.matchTemplate(img, templ, method) 参数:(img: 原始图像.temple: 模板图像.method: 匹配度计算方法) 方法如下: cv2.TM_SQD
-
opencv python图像梯度实例详解
这篇文章主要介绍了opencv python图像梯度实例详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 一阶导数与Soble算子 二阶导数与拉普拉斯算子 图像边缘: Soble算子: 二阶导数: 拉普拉斯算子: import cv2 as cv import numpy as np # 图像梯度(由x,y方向上的偏导数和偏移构成),有一阶导数(sobel算子)和二阶导数(Laplace算子) # 用于求解图像边缘,一阶的极大值,二阶的零点
-
opencv python 图像轮廓/检测轮廓/绘制轮廓的方法
图像的轮廓检测,如计算多边形外界.形状毕竟.计算感兴趣区域等. Contours : Getting Started 轮廓 简单地解释为连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度. 轮廓是形状分析和物体检测和识别的有用工具 NOTE 为获得更好的准确性,请使用二值图,在找到轮廓之前,应用阈值法或canny边缘检测 从OpenCV 3.2开始,findContours()不再修改源图像,而是将修改后的图像作为三个返回参数中的第一个返回 在OpenCV中,查找轮廓是从黑色背景中查找白色对
-
Python使用Opencv实现图像特征检测与匹配的方法
特征检测是计算机对一张图像中最为明显的特征进行识别检测并将其勾画出来.大多数特征检测都会涉及图像的角点.边和斑点的识别.或者是物体的对称轴. 角点检测 是由Opencv的cornerHarris函数实现,其他函数参数说明如下: cv2.cornerHarris(src=gray, blockSize=9, ksize=23, k=0.04) # cornerHarris参数: # src - 数据类型为 float32 的输入图像. # blockSize - 角点检测中要考虑的领域大小. #
-
python Opencv计算图像相似度过程解析
这篇文章主要介绍了python Opencv计算图像相似度过程解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 一.相关概念 一般我们人区分谁是谁,给物品分类,都是通过各种特征去辨别的,比如黑长直.大白腿.樱桃唇.瓜子脸.王麻子脸上有麻子,隔壁老王和儿子很像,但是儿子下巴涨了一颗痣和他妈一模一样,让你确定这是你儿子. 还有其他物品.什么桌子带腿.镜子反光能在里面倒影出东西,各种各样的特征,我们通过学习.归纳,自然而然能够很快识别分类出新物品.
-
Python+OpenCV实现图像的全景拼接
本文实例为大家分享了Python+OpenCV实现图像的全景拼接的具体代码,供大家参考,具体内容如下 环境:python3.5.2 + openCV3.4 1.算法目的 将两张相同场景的场景图片进行全景拼接. 2.算法步骤 本算法基本步骤有以下几步: 步骤1:将图形先进行桶形矫正 没有进行桶形变换的图片效果可能会像以下这样: 图片越多拼接可能就会越夸张. 本算法是将图片进行桶形矫正.目的就是来缩减透视变换(Homography)之后图片产生的变形,从而使拼接图片变得畸形. 步骤2:特征点匹配 本
-
基于Python和openCV实现图像的全景拼接详细步骤
基本介绍 图像的全景拼接,即"缝合"两张具有重叠区域的图来创建一张全景图.其中用到了计算机视觉和图像处理技术有:关键点检测.局部不变特征.关键点匹配.RANSAC(Random Sample Consensus,随机采样一致性)和透视变形. 具体步骤 (1)检测左右两张图像的SIFT关键特征点,并提取局部不变特征 : (2)使用knnMatch检测来自右图(左图)的SIFT特征,与左图(右图)进行匹配 : (3)计算视角变换矩阵H,用变换矩阵H对右图进行扭曲变换: (4)将左图(右图)