Python语言实现SIFT算法
目录
- 一、什么是SIFT算法
- 二、准备工作
- 2.1 实验设备
- 2.2 OpenCV安装
- 三、实验工作
- 3.1 图像选择
- 3.2 程序实现
- 3.3 程序结果
本文侧重于如何使用Python语言实现SIFT算法
所有程序已打包:基于OpenCV-Python的SIFT算法的实现
一、什么是SIFT算法
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。
二、准备工作
2.1 实验设备
本文在Windows10系统上,使用pycharm软件完成所有实验。
2.2 OpenCV安装
我们可以使用OpenCV库中的cv2.xfeatures2d.SIFT_create()函数实现SIFT,但由于专利保护,很多版本的OpenCV库已无法提供该函数,目前仅3.4.2.16版本的OpenCV库可使用此函数。
安装教程:
(1)查看当前版本opencv:进入cmd(组合键win+R,输入cmd),输入conda list,查看当前pycharm所有库并找到opencv-python,若找不到库,说明没有安装。
(2)卸载原版本(在cmd中输入:pip uninstall opencv)
(3)安装新版本(在cmd中输入:pip install opencv-python==3.4.2.16 -i "https://pypi.doubanio.com/simple/"
(4)安装附属库(在cmd中输入:pip install opencv-contrib-python==3.4.2.16 -i "https://pypi.doubanio.com/simple/")
三、实验工作
3.1 图像选择
这里选择经典的lena图像作为实验对象,为了选择一个待匹配图像,本文使用如下代码对lena图像进行逆时针45°旋转。
from PIL import Image
img = Image.open('lena.png')
img2 = img.rotate(45) # 逆时针旋转45°
img2.save("lena_rot45.png")
img2.show()
参考图像与待匹配图像(即旋转图像)如下图所示:
3.2 程序实现
"""
图像匹配——SIFT点特征匹配实现步骤:
(1)读取图像;
(2)定义sift算子;
(3)通过sift算子对需要匹配的图像进行特征点获取;
a.可获取各匹配图像经过sift算子的特征点数目
(4)可视化特征点(在原图中标记为圆圈);
a.为方便观察,可将匹配图像横向拼接
(5)图像匹配(特征点匹配);
a.通过调整ratio获取需要进行图像匹配的特征点数量(ratio值越大,匹配的线条越密集,但错误匹配点也会增多)
b.通过索引ratio选择固定的特征点进行图像匹配
(6)将待匹配图像通过旋转、变换等方式将其与目标图像对齐
"""
import cv2 # opencv版本需为3.4.2.16
import numpy as np # 矩阵运算库
import time # 时间库
original_lena = cv2.imread('lena.png') # 读取lena原图
lena_rot45 = cv2.imread('lena_rot45.png') # 读取lena旋转45°图
sift = cv2.xfeatures2d.SIFT_create()
# 获取各个图像的特征点及sift特征向量
# 返回值kp包含sift特征的方向、位置、大小等信息;des的shape为(sift_num, 128), sift_num表示图像检测到的sift特征数量
(kp1, des1) = sift.detectAndCompute(original_lena, None)
(kp2, des2) = sift.detectAndCompute(lena_rot45, None)
# 特征点数目显示
print("=========================================")
print("=========================================")
print('lena 原图 特征点数目:', des1.shape[0])
print('lena 旋转图 特征点数目:', des2.shape[0])
print("=========================================")
print("=========================================")
# 举例说明kp中的参数信息
for i in range(2):
print("关键点", i)
print("数据类型:", type(kp1[i]))
print("关键点坐标:", kp1[i].pt)
print("邻域直径:", kp1[i].size)
print("方向:", kp1[i].angle)
print("所在的图像金字塔的组:", kp1[i].octave)
print("=========================================")
print("=========================================")
"""
首先对原图和旋转图进行特征匹配,即图original_lena和图lena_rot45
"""
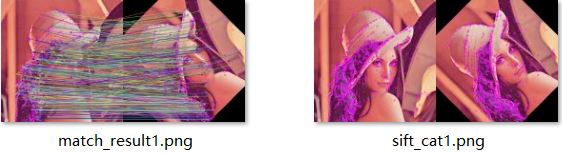
# 绘制特征点,并显示为红色圆圈
sift_original_lena = cv2.drawKeypoints(original_lena, kp1, original_lena, color=(255, 0, 255))
sift_lena_rot45 = cv2.drawKeypoints(lena_rot45, kp2, lena_rot45, color=(255, 0, 255))
sift_cat1 = np.hstack((sift_original_lena, sift_lena_rot45)) # 对提取特征点后的图像进行横向拼接
cv2.imwrite("sift_cat1.png", sift_cat1)
print('原图与旋转图 特征点绘制图像已保存')
cv2.imshow("sift_point1", sift_cat1)
cv2.waitKey()
# 特征点匹配
# K近邻算法求取在空间中距离最近的K个数据点,并将这些数据点归为一类
start = time.time() # 计算匹配点匹配时间
bf = cv2.BFMatcher()
matches1 = bf.knnMatch(des1, des2, k=2)
print('用于 原图和旋转图 图像匹配的所有特征点数目:', len(matches1))
# 调整ratio
# ratio=0.4:对于准确度要求高的匹配;
# ratio=0.6:对于匹配点数目要求比较多的匹配;
# ratio=0.5:一般情况下。
ratio1 = 0.5
good1 = []
for m1, n1 in matches1:
# 如果最接近和次接近的比值大于一个既定的值,那么我们保留这个最接近的值,认为它和其匹配的点为good_match
if m1.distance < ratio1 * n1.distance:
good1.append([m1])
end = time.time()
print("匹配点匹配运行时间:%.4f秒" % (end-start))
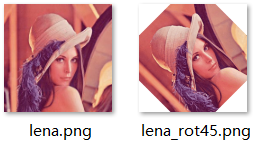
# 通过对good值进行索引,可以指定固定数目的特征点进行匹配,如good[:20]表示对前20个特征点进行匹配
match_result1 = cv2.drawMatchesKnn(original_lena, kp1, lena_rot45, kp2, good1, None, flags=2)
cv2.imwrite("match_result1.png", match_result1)
print('原图与旋转图 特征点匹配图像已保存')
print("=========================================")
print("=========================================")
print("原图与旋转图匹配对的数目:", len(good1))
for i in range(2):
print("匹配", i)
print("数据类型:", type(good1[i][0]))
print("描述符之间的距离:", good1[i][0].distance)
print("查询图像中描述符的索引:", good1[i][0].queryIdx)
print("目标图像中描述符的索引:", good1[i][0].trainIdx)
print("=========================================")
print("=========================================")
cv2.imshow("original_lena and lena_rot45 feature matching result", match_result1)
cv2.waitKey()
# 将待匹配图像通过旋转、变换等方式将其与目标图像对齐,这里使用单应性矩阵。
# 单应性矩阵有八个参数,如果要解这八个参数的话,需要八个方程,由于每一个对应的像素点可以产生2个方程(x一个,y一个),那么总共只需要四个像素点就能解出这个单应性矩阵。
if len(good1) > 4:
ptsA = np.float32([kp1[m[0].queryIdx].pt for m in good1]).reshape(-1, 1, 2)
ptsB = np.float32([kp2[m[0].trainIdx].pt for m in good1]).reshape(-1, 1, 2)
ransacReprojThreshold = 4
# RANSAC算法选择其中最优的四个点
H, status =cv2.findHomography(ptsA, ptsB, cv2.RANSAC, ransacReprojThreshold)
imgout = cv2.warpPerspective(lena_rot45, H, (original_lena.shape[1], original_lena.shape[0]),
flags=cv2.INTER_LINEAR + cv2.WARP_INVERSE_MAP)
cv2.imwrite("imgout.png", imgout)
cv2.imshow("lena_rot45's result after transformation", imgout)
cv2.waitKey()
3.3 程序结果
到此这篇关于Python语言实现SIFT算法的文章就介绍到这了,更多相关python SIFT算法内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python opencv之SIFT算法示例
本文介绍了python opencv之SIFT算法示例,分享给大家,具体如下: 目标: 学习SIFT算法的概念 学习在图像中查找SIFT关键的和描述符 原理: (原理部分自己找了不少文章,内容中有不少自己理解和整理的东西,为了方便快速理解内容和能够快速理解原理,本文尽量不使用数学公式,仅仅使用文字来描述.本文中有很多引用别人文章的内容,仅供个人记录使用,若有错误,请指正出来,万分感谢) 之前的harris算法和Shi-Tomasi 算法,由于算法原理所致,具有旋转不变性,在目标图片发生旋转时依然
-
python利用opencv实现SIFT特征提取与匹配
本文实例为大家分享了利用opencv实现SIFT特征提取与匹配的具体代码,供大家参考,具体内容如下 1.SIFT 1.1.sift的定义 SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述.这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子. 1.2.sift算法介绍 SIFT由David Lowe在1999年提出,在2004年加以完善 .SIFT在数字图像的特征描述方面当之无愧可称之为最红
-

应用OpenCV和Python进行SIFT算法的实现详解
应用OpenCV和Python进行SIFT算法的实现 如下图为进行测试的gakki101和gakki102,分别验证基于BFmatcher.FlannBasedMatcher等的SIFT算法,对比其优劣.为体现出匹配效果对于旋转特性的优势,将图gakki101做成具有旋转特性的效果. 基于BFmatcher的SIFT实现 BFmatcher(Brute-Force Matching)暴力匹配,应用BFMatcher.knnMatch( )函数来进行核心的匹配,knnMatch(k-nearest
-
win7下 python3.6 安装opencv 和 opencv-contrib-python解决 cv2.xfeatures2d.SIFT_create() 的问题
1.Anaconda 安装python3.6 conda create -n match python=3.6 Python版本默认安装是 3.6.9 2.安装opencv 执行完毕后,安装opencv-python pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple some-package opencv-python 的版本为4.1.1.26 3.安装opencv-contrib-python pip i
-
Python语言实现SIFT算法
目录 一.什么是SIFT算法 二.准备工作 2.1 实验设备 2.2 OpenCV安装 三.实验工作 3.1 图像选择 3.2 程序实现 3.3 程序结果 本文侧重于如何使用Python语言实现SIFT算法 所有程序已打包:基于OpenCV-Python的SIFT算法的实现 一.什么是SIFT算法 SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述.这种描述具有尺度不变性,可在图像中检测出关键点,是一种局
-
Python语言描述KNN算法与Kd树
最近邻法和k-近邻法 下面图片中只有三种豆,有三个豆是未知的种类,如何判定他们的种类? 提供一种思路,即:未知的豆离哪种豆最近就认为未知豆和该豆是同一种类.由此,我们引出最近邻算法的定义:为了判定未知样本的类别,以全部训练样本作为代表点,计算未知样本与所有训练样本的距离,并以最近邻者的类别作为决策未知样本类别的唯一依据.但是,最近邻算法明显是存在缺陷的,比如下面的例子:有一个未知形状(图中绿色的圆点),如何判断它是什么形状? 显然,最近邻算法的缺陷--对噪声数据过于敏感,为了解决这个问题,我们可
-
给你选择Python语言实现机器学习算法的三大理由
基于以下三个原因,我们选择Python作为实现机器学习算法的编程语言:(1) Python的语法清晰:(2) 易于操作纯文本文件:(3) 使用广泛,存在大量的开发文档. 可执行伪代码 Python具有清晰的语法结构,大家也把它称作可执行伪代码(executable pseudo-code).默认安装的Python开发环境已经附带了很多高级数据类型,如列表.元组.字典.集合.队列等,无需进一步编程就可以使用这些数据类型的操作.使用这些数据类型使得实现抽象的数学概念非常简单.此外,读者还可以使用自己
-
Python语言实现机器学习的K-近邻算法
写在前面 额...最近开始学习机器学习嘛,网上找到一本关于机器学习的书籍,名字叫做<机器学习实战>.很巧的是,这本书里的算法是用Python语言实现的,刚好之前我学过一些Python基础知识,所以这本书对于我来说,无疑是雪中送炭啊.接下来,我还是给大家讲讲实际的东西吧. 什么是K-近邻算法? 简单的说,K-近邻算法就是采用测量不同特征值之间的距离方法来进行分类.它的工作原理是:存在一个样本数据集合,也称作训练样本集,并且样本集中每个数据都存在标签,即我们知道样本集中每一数据与所属分类的对应关系
-
Python语言描述机器学习之Logistic回归算法
本文介绍机器学习中的Logistic回归算法,我们使用这个算法来给数据进行分类.Logistic回归算法同样是需要通过样本空间学习的监督学习算法,并且适用于数值型和标称型数据,例如,我们需要根据输入数据的特征值(数值型)的大小来判断数据是某种分类或者不是某种分类. 一.样本数据 在我们的例子中,我们有这样一些样本数据: 样本数据有3个特征值:X0X0,X1X1,X2X2 我们通过这3个特征值中的X1X1和X2X2来判断数据是否符合要求,即符合要求的为1,不符合要求的为0. 样本数据分类存放在一个
-
python语言编程实现凯撒密码、凯撒加解密算法
凯撒密码的原理:计算并输出偏移量为3的凯撒密码的结果 注意:密文是大写字母,在变换加密之前把明文字母都替换为大写字母 def casar(message): # *************begin************# message1=message.upper() #把明文字母变成大写 message1=list(message1) #将明文字符串转换成列表 list1=[] for i in range(len(message1)): if message1[i]==' ': lis
-
python语言中有算法吗
了解算法之前,我们先看一下什么是算法 定义:算法(Algorithm)是指解题方案的准确而完整的描述,是一系列解决问题的清晰指令,算法代表着用系统的方法描述解决问题的策略机制.也就是说,能够对一定规范的输入,在有限时间内获得所要求的输出.如果一个算法有缺陷,或不适合于某个问题,执行这个算法将不会解决这个问题.不同的算法可能用不同的时间.空间或效率来完成同样的任务.一个算法的优劣可以用空间复杂度与时间复杂度来衡量. python中的常见算法 冒泡排序 效率:O(n2) 原理: 比较相邻的元素,如果
-
Python 语言实现六大查找算法
目录 一.顺序查找算法 二.折半查找算法 三.插补查找算法 四.哈希查找算法 五.分块查找算法 六.斐波那契查找算法 七.六种查找算法的时间复杂度 一.顺序查找算法 顺序查找又称为线性查找,是最简单的查找算法.这种算法就是按照数据的顺序一项一项逐个查找,所以不管数据顺序如何,都得从头到尾地遍历一次.顺序查找的优点就是数据在查找前,不需要对其进行任何处理(包括排序).缺点是查找速度慢,如果数据列的第一个数据就是想要查找的数据,则该算法查找速度为最快,只需查找一次即可:如果查找的数据是数据列的最后一
-
python实现红包裂变算法
本文实例介绍了python实现红包裂变算法,分享给大家供大家参考,具体内容如下 Python语言库函数 安装:pip install redpackets 使用: import redpackets redpackets.split(total, num, min=0.01) 1.前情提要 过年期间支付宝红包.微信红包成了全民焦点,虽然大多数的红包就一块八角的样子,还是搞得大家乐此不疲.作为一名程序猿,自然会想了解下红包的实现细节,微信目前是没有公布红包的实现细节的,所以这里就综合网上的讨论通过