Python+OpenCV检测灯光亮点的实现方法
本篇博文分享一篇寻找图像中灯光亮点(图像中最亮点)的教程,例如,检测图像中五个灯光的亮点并标记,项目效果如下所示:


第1步:导入并打开原图像,实现代码如下所示:
# import the necessary packages
from imutils import contours
from skimage import measure
import numpy as np
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,
help="path to the image file")
args = vars(ap.parse_args())
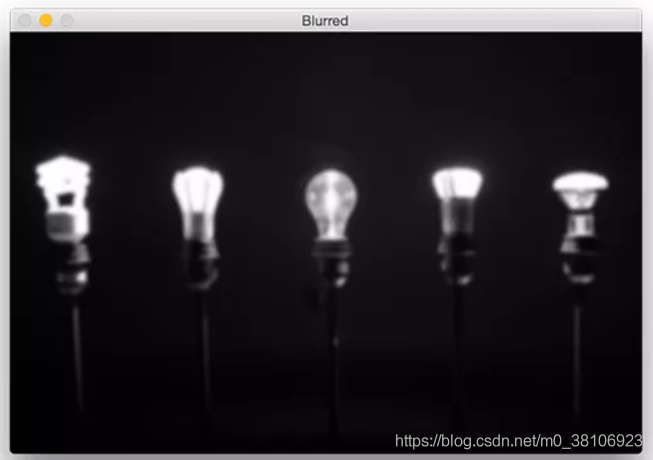
第2步:开始检测图像中最亮的区域,首先需要从磁盘加载图像,然后将其转换为灰度图并进行平滑滤波,以减少高频噪声,实现代码如下所示:
#load the image, convert it to grayscale, and blur it image = cv2.imread(args["image"]) gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (11, 11), 0)
导入亮灯图像,过滤后效果如下所示:
第3步:阈值化处理,为了显示模糊图像中最亮的区域,将像素值p >= 200,设置为255(白色),像素值< 200,设置为0(黑色),实现代码如下所示:
# threshold the image to reveal light regions in the # blurred image thresh = cv2.threshold(blurred, 200, 255, cv2.THRESH_BINARY)[1]
效果如下所示:

第4步:此时可看到图像中存在噪声(小斑点),所以需要通过腐蚀和膨胀操作来清除,实现代码如下所示:
# perform a series of erosions and dilations to remove # any small blobs of noise from the thresholded image thresh = cv2.erode(thresh, None, iterations=2) thresh = cv2.dilate(thresh, None, iterations=4)
此时“干净”的图像如下所示:

第5步:本项目的关键步骤是对上图中的每个区域进行标记,即使在应用了腐蚀和膨胀后,仍然想要过滤掉剩余的小块儿区域。一个很好的方法是执行连接组件分析,实现代码如下所示:
# perform a connected component analysis on the thresholded # image, then initialize a mask to store only the "large" # components labels = measure.label(thresh, neighbors=8, background=0) mask = np.zeros(thresh.shape, dtype="uint8") # loop over the unique components for label in np.unique(labels): # if this is the background label, ignore it if label == 0: continue # otherwise, construct the label mask and count the # number of pixels labelMask = np.zeros(thresh.shape, dtype="uint8") labelMask[labels == label] = 255 numPixels = cv2.countNonZero(labelMask) # if the number of pixels in the component is sufficiently # large, then add it to our mask of "large blobs" if numPixels > 300: mask = cv2.add(mask, labelMask)
上述代码中,第4行使用scikit-image库执行实际的连接组件分析。measure.lable返回的label和阈值图像有相同的大小,唯一的区别就是label存储的为阈值图像每一斑点对应的正整数。
然后在第5行初始化一个掩膜来存储大的斑点。
第7行开始循环遍历每个label中的正整数标签,如果标签为零,则表示正在检测背景并可以安全的忽略它(9,10行)。否则,为当前区域构建一个掩码。
下面提供了一个GIF动画,它可视化地构建了每个标签的labelMask。使用这个动画来帮助你了解如何访问和显示每个单独的组件:
第15行对labelMask中的非零像素进行计数。如果numPixels超过了一个预先定义的阈值(在本例中,总数为300像素),那么认为这个斑点“足够大”,并将其添加到掩膜中。输出掩模如下图所示:

第6步:此时图像中所有小的斑点都被过滤掉了,只有大的斑点被保留了下来。最后一步是在的图像上绘制标记的斑点,实现代码如下所示:
# find the contours in the mask, then sort them from left to
# right
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts)
cnts = contours.sort_contours(cnts)[0]
# loop over the contours
for (i, c) in enumerate(cnts):
# draw the bright spot on the image
(x, y, w, h) = cv2.boundingRect(c)
((cX, cY), radius) = cv2.minEnclosingCircle(c)
cv2.circle(image, (int(cX), int(cY)), int(radius),
(0, 0, 255), 3)
cv2.putText(image, "#{}".format(i + 1), (x, y - 15),
cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0, 0, 255), 2)
# show the output image
cv2.imshow("Image", image)
cv2.waitKey(0)
最后运行程序,可实现灯光亮点的检测和标记,每个灯泡都被独特地标上了圆圈,圆圈围绕着每个单独的明亮区域,效果如下所示:


本文来源于:Detecting multiple bright spots in an image with Python and OpenCV
到此这篇关于Python+OpenCV检测灯光亮点的实现方法的文章就介绍到这了,更多相关OpenCV 检测灯光亮点内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python3+opencv 使用灰度直方图来判断图片的亮暗操作
1.如何让计算机自动判断一张图是否偏暗?或是判断一张图是否是处于夜晚?我们可以先把图片转换为灰度图,然后根据灰度值的分布来判断,如: 我们可以从上图看到,晚上的图片的灰度值是集中在前段的,如0~30多左右,我们再看一张比较明亮的图片: 明亮的图片的灰度直方图是比较靠后的. 因此要判断图片的亮暗,只需要统计偏暗的像素个数,再除以图片像素的总个数,得到百分比p即可,至于p大于多少即判断为暗,则可以由你自己设置.下面给出代码,此代码可以在装满图片的目录里选出偏暗的图片,然后把这些图片保存下来. 2.代
-

opencv调整图像亮度对比度的示例代码
图像处理 图像变换就是找到一个函数,把原始图像矩阵经过函数处理后,转换为目标图像矩阵. 可以分为两种方式,即像素级别的变换和区域级别的变换 Point operators (pixel transforms) Neighborhood (area-based) operators 像素级别的变换就相当于\(p_{after}(i,j) = f(p_{before}(i,j))\),即变换后的每个像素值都与变换前的同位置的像素值有个函数映射关系. 对比度和亮度改变 线性变换 最常用的是线性变换.即
-
Python+OpenCV检测灯光亮点的实现方法
本篇博文分享一篇寻找图像中灯光亮点(图像中最亮点)的教程,例如,检测图像中五个灯光的亮点并标记,项目效果如下所示: 第1步:导入并打开原图像,实现代码如下所示: # import the necessary packages from imutils import contours from skimage import measure import numpy as np import argparse import imutils import cv2 # construct the arg
-
python opencv 检测移动物体并截图保存实例
最近在老家找工作,无奈老家工作真心太少,也没什么面试机会,不过之前面试一家公司,提了一个有意思的需求,检测河面没有有什么船只之类的物体,我当时第一反应是用opencv做识别,不过回家想想,河面相对的东西比较少,画面比较单一,只需要检测有没有移动的物体不就简单很多嘛,如果做街道垃圾检测的话可能就很复杂了,毕竟街道上行人,车辆,动物,很多干扰物,于是就花了一个小时写了一个小的demo,只需在程序同级目录创建一个img目录就可以了 # -*-coding:utf-8 -*- __author__ =
-
Python+OpenCV 图像边缘检测四种实现方法
目录 1.Sobel算子 2.Schaar算子(更能体现细节) 3.Laplacian算子(基于零穿越的,二阶导数的0值点) 4.Canny边缘检测(被认为是最优的边缘检测算法) 总结 import cv2 as cv import numpy as np import matplotlib.pyplot as plt # 设置兼容中文 plt.rcParams['font.family'] = ['sans-serif'] plt.rcParams['font.sans-serif'] = [
-
Python+Opencv实现物体尺寸测量的方法详解
目录 1.效果展示 2.项目介绍 3.项目搭建 4.utils.py文件代码展示与讲解 5.项目代码展示与讲解 6.项目资源 7.项目总结 1.效果展示 我们将以两种方式来展示我们这个项目的效果. 下面这是视频的实时检测,我分别用了盒子和盖子来检测,按理来说效果不应该怎么差的,但我实在没有找到合适的背景与物体.且我的摄像头使用的是外设,我不得不手持,所以存在一点点的抖动,但我可以保证,它是缺少了适合检测物体与背景. 我使用手机拍了一张照片并经过了ps修改了背景,效果不错. 2.项目介绍 本项目中
-
Python+OpenCV实现信用卡数字识别的方法详解
目录 一.模板图像处理 二.信用卡图片预处理 一.模板图像处理 (1)灰度图.二值图转化 template = cv2.imread('C:/Users/bwy/Desktop/number.png') template_gray = cv2.cvtColor(template, cv2.COLOR_BGR2GRAY) cv_show('template_gray', template_gray) # 形成二值图像,因为要做轮廓检测 ret, template_thresh = cv2.thre
-
Python实现检测文件MD5值的方法示例
本文实例讲述了Python实现检测文件MD5值的方法.分享给大家供大家参考,具体如下: 前面介绍过Python计算文件md5值的方法,这里分析一下Python检测文件MD5值的另一种实现方法. 概述: MD5(单向散列算法)的全称是Message-Digest Algorithm 5(信息-摘要算法),经MD2.MD3和MD4发展而来.MD5算法的使用不需要支付任何版权费用. 实现代码: #python 检测文件MD5值 #python version 2.6 import hashlib im
-
python opencv检测目标颜色的实例讲解
实例如下所示: # -*- coding:utf-8 -*- __author__ = 'kingking' __version__ = '1.0' __date__ = '14/07/2017' import cv2 import numpy as np import time if __name__ == '__main__': Img = cv2.imread('example.png')#读入一幅图像 kernel_2 = np.ones((2,2),np.uint8)#2x2的卷积核
-
python opencv检测直线 cv2.HoughLinesP的实现
cv2.HoughLines()函数是在二值图像中查找直线,cv2.HoughLinesP()函数可以查找直线段. cv2.HoughLinesP()函数原型: HoughLinesP(image, rho, theta, threshold, lines=None, minLineLength=None, maxLineGap=None) image: 必须是二值图像,推荐使用canny边缘检测的结果图像: rho: 线段以像素为单位的距离精度,double类型的,推荐用1.0 theta:
-
Python OpenCV读取中文路径图像的方法
引言 这几天做点小东西,涉及到OpenCV读取中文图像的问题 如果直接读取中文路径的图像,往往返回[] import cv2 cv_im = cv2.imread('老干妈.jpg') 缘起 偶然发现opencv 读取图像,解决imread不能读取中文路径的问题文章,代码简单有效,可以参考下文章底部附录 im = cv2.imdecode(np.fromfile(im_name,dtype=np.uint8),-1) 但是作者代码注释中说该方法读取的图像的通道就会变为RGB,但是我实验仍为BGR
-
用Python+OpenCV对比图像质量的几种方法
前言 图片的本质就是大量像素在二维平面上的组合,每个像素点用数字化方式记录颜色.可以直观的想象,一张图片就是一个巨大的电子栅格,每个格子内有一盏灯泡,这个灯泡可以变换256的三次方种颜色,就像下面这张卡通像素图一样,越清晰的图片像素越密集. 这一次来看看OpenCV提供的两种图像质量对比方式(PSNR & SSIM)及其扩展, 这篇文章会涉及到一点数学公式,顺便介绍一个我用过的生成公式的最佳在线编辑工具,秒杀所有收费工具. 链接在这里, 请收好: https://www.mathcha.io/e