OpenCV实现低对比度图像脏污区域检测
目录
- 1. 低对比度图像脏污区域检测
- 2. 实现方法介绍
- 3. C++源码实现
- 4.结果
- 总结
- 参考
1. 低对比度图像脏污区域检测
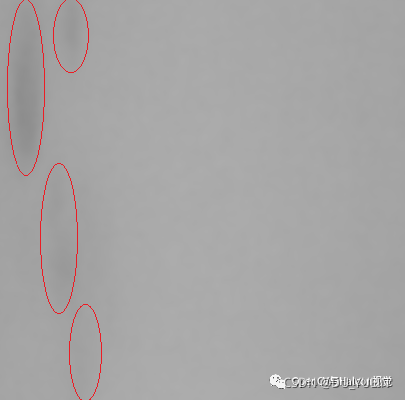
先上图:


第一张图如果不是标注结果,我都没有发现脏污区域在哪里,第二张图还清晰一些,基本可以看出来图像靠近左边缘的位置有偏暗的区域,这就是我们所说的脏污区域了,也是我们要检测的区域。
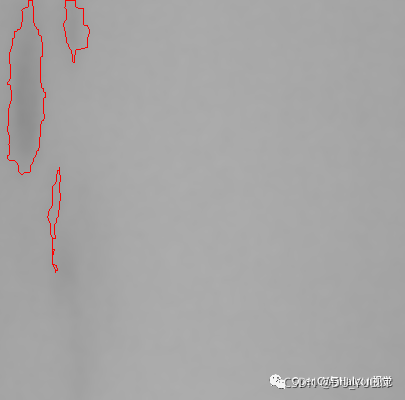
标注结果图:

2. 实现方法介绍
这里介绍两种实现方法,
第一种是用C++实现参考博文的方法,即利用梯度方法来检测,具体步骤如下:
- 对图像进行高斯模糊去噪,梯度计算对噪声很敏感;
- 调用Sobel函数计算图像在x,y方向梯度;
- 调用convertScaleAbs函数将x,y梯度图像像素值限制在0-255;
- 调用addWeight函数将x,y梯度图像融合;
- 调用threshold函数对融合图像进行二值化;
- 使用先腐蚀、后膨胀的形态学处理方法对二值图像进行非脏污区域过滤;
- 调用findContours方法查找脏污区域轮廓。
第二种方法是本人根据提高图像对比度思路实现的,具体步骤如下:
8. 对图像进行高斯模糊去噪;
9. 使用局部直方图均衡化方法来提高图像对比度;
10. 使用OTSU二值化阈值方法来粗略分割脏污区域;
11. 对二值图像使用腐蚀的形态学操作过滤掉部分非脏污区域;
12. 调用findContours方法查找脏污区域轮廓。
3. C++源码实现
#include <iostream>
#include <opencv2\imgcodecs.hpp>
#include <opencv2\core.hpp>
#include <opencv2\imgproc.hpp>
#include <opencv2\highgui.hpp>
#include <vector>
int main()
{
using namespace cv;
std::string strImgFile = "C:\\Temp\\common\\Workspace\\Opencv\\images\\led1.jpg";
Mat mSrc = imread(strImgFile);
CV_Assert(mSrc.empty() == false);
Mat mSrc2 = mSrc.clone();
CV_Assert(mSrc2.empty() == false);
Mat mGray;
cvtColor(mSrc, mGray, COLOR_BGR2GRAY);
GaussianBlur(mGray, mGray, Size(5, 5), 1.0);
Mat mGray2 = mGray.clone();
CV_Assert(mGray.empty() == false);
imshow("gray", mGray.clone());
//方法1:利用梯度变化检测缺陷
Mat mSobelX, mSobelY;
Sobel(mGray, mSobelX, CV_16S, 1, 0, 7);
Sobel(mGray, mSobelY, CV_16S, 0, 1, 7);
convertScaleAbs(mSobelX, mSobelX);
convertScaleAbs(mSobelY, mSobelY);
Mat mEdge;
addWeighted(mSobelX, 1, mSobelY, 1, 0, mEdge);
imshow("edge", mEdge);
Mat mThresh;
threshold(mEdge, mThresh, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("thresh", mThresh);
Mat kernel1 = getStructuringElement(MORPH_RECT, Size(11, 11));
CV_Assert(kernel1.empty() == false);
Mat mMorph;
morphologyEx(mThresh, mMorph, MORPH_ERODE, kernel1);
imshow("erode", mMorph);
Mat kernel2 = getStructuringElement(MORPH_RECT, Size(5, 5));
morphologyEx(mMorph, mMorph, MORPH_DILATE, kernel2);
imshow("dilate", mMorph);
std::vector<std::vector<Point>> contours;
findContours(mMorph, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours.size(); i++)
{
float area = contourArea(contours[i]);
if (area > 200)
{
drawContours(mSrc, contours, i, Scalar(0, 0, 255));
}
}
imshow("result1", mSrc.clone());
//方法2: 利用局部直方图均衡化方法检测缺陷
Ptr<CLAHE> ptrCLAHE = createCLAHE(20, Size(30, 30));
ptrCLAHE->apply(mGray2, mGray2);
imshow("equalizeHist", mGray2);
Mat mThresh2;
threshold(mGray2, mThresh2, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
CV_Assert(mThresh2.empty() == false);
imshow("thresh", mThresh2);
Mat kernel2_1 = getStructuringElement(MORPH_RECT, Size(9, 9));
Mat mMorph2;
morphologyEx(mThresh2, mMorph2, MORPH_ERODE, kernel2_1);
CV_Assert(mMorph2.empty() == false);
imshow("morph2", mMorph2);
std::vector<std::vector<Point>> contours2;
findContours(mMorph2, contours2, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours2.size(); i++)
{
float area = contourArea(contours2[i]);
if (area > 200)
{
drawContours(mSrc2, contours2, i, Scalar(0, 0, 255));
}
}
imshow("result2", mSrc2);
waitKey(0);
destroyAllWindows();
system("pause");
return 0;
}
4.结果
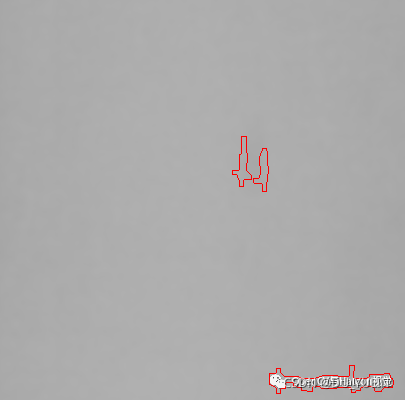
梯度方法检测结果:
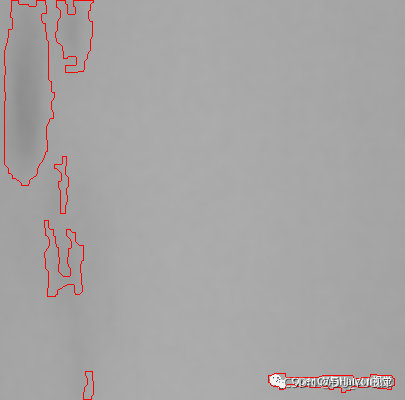
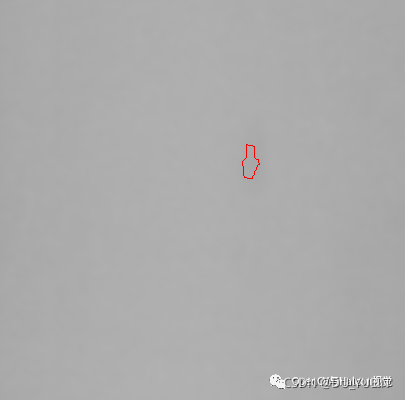
局部直方图均衡化方法检测结果:
总结
相对于梯度方法,局部直方图均衡化方法需要特别注意局部窗口大小参数以及阈限值参数的选择,本人也是尝试了多次才达到比较好的效果。再一次体会到传统图像处理的痛处,没有通用的参数适用于所有的应用实例,不同的场景要配置不同的参数才能达到想要的结果。
参考
https://jishuin.proginn.com/p/763bfbd62291
到此这篇关于OpenCV实现低对比度图像脏污区域检测的文章就介绍到这了,更多相关OpenCV图像脏污区域检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

python opencv实现图像边缘检测
本文利用python opencv进行图像的边缘检测,一般要经过如下几个步骤: 1.去噪 如cv2.GaussianBlur()等函数: 2.计算图像梯度 图像梯度表达的是各个像素点之间,像素值大小的变化幅度大小,变化较大,则可以认为是出于边缘位置,最多可简化为如下形式: 3.非极大值抑制 在获得梯度的方向和大小之后,应该对整幅图像做一个扫描,去除那些非边界上的点.对每一个像素进行检查,看这个点的梯度是不是周围具有相同梯度方向的点中最大的.如下图所示: 4.滞后阈值 现在要确定那些边界才是真正的
-
Python中OpenCV图像特征和harris角点检测
目录 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 import cv2 import numpy as np img =cv2.imread('pie.png') print('img.shape',img.
-
Python+OpenCV图像处理——实现直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等).最基本的霍夫变换是从黑白图像中检测直线(线段). 2.Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等) 3.霍夫线变
-
OpenCV实现图像角点检测
历时一个多月,于今天上午终于将项目交上去了,这期间虽很辛苦,但是成长了不少,在此将项目中涉及到的知识点进行整理,本文主要介绍图像的角点检测: 一.代码部分: // Detect_Corners.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include "opencv2/opencv.hpp" #include <opencv2/imgproc/imgproc.hpp> #include <iostre
-
OpenCV实现图像轮廓检测以及外接矩形
前两篇博文分别介绍了图像的边缘检测和轮廓检测,本文接着介绍图像的轮廓检测和轮廓外接矩形: 一.代码部分: // extract_contours.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include<cv.h> #include<highgui.h> using namespace cv; using namespace std; int _tmain(int argc, _TCHAR* argv[]) { /
-
Python-OpenCV实现图像缺陷检测的实例
在Jupyter Notebook上使用Python+opencv实现如下图像缺陷检测.关于opencv库的安装可以参考:Python下opencv库的安装过程与一些问题汇总. 1.实现代码 import cv2 import numpy from PIL import Image, ImageDraw, ImageFont #用于给图片添加中文字符 def ImgText_CN(img, text, left, top, textColor=(0, 255, 0), textSize=20):
-
OpenCV实现图像的直线检测
上一篇博文介绍了图像的Canny边缘检测,本文主要介绍图像的直线检测部分,主要使用概率霍夫变换来检测直线,调用的函数为HoughLinesP(),下面给出代码部分以及直线检测效果图: 1.代码部分: // Detect_Lines.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include <cv.h> #include "highgui.h" using namespace std; using names
-
使用OpenCV检测图像中的矩形
本文实例为大家分享了OpenCV检测图像中矩形的具体代码,供大家参考,具体内容如下 前言 1.OpenCV没有内置的矩形检测的函数,如果想检测矩形,要自己去实现. 2.我这里使用的OpenCV版本是3.30. 矩形检测 1.得到原始图像之后,代码处理的步骤是: (1)滤波增强边缘. (2)分离图像通道,并检测边缘. (3) 提取轮廓. (4)使用图像轮廓点进行多边形拟合. (5)计算轮廓面积并得到矩形4个顶点. (6)求轮廓边缘之间角度的最大余弦. (7)画出矩形. 2.代码 //检测矩形 //
-
opencv python 图像轮廓/检测轮廓/绘制轮廓的方法
图像的轮廓检测,如计算多边形外界.形状毕竟.计算感兴趣区域等. Contours : Getting Started 轮廓 简单地解释为连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度. 轮廓是形状分析和物体检测和识别的有用工具 NOTE 为获得更好的准确性,请使用二值图,在找到轮廓之前,应用阈值法或canny边缘检测 从OpenCV 3.2开始,findContours()不再修改源图像,而是将修改后的图像作为三个返回参数中的第一个返回 在OpenCV中,查找轮廓是从黑色背景中查找白色对
-
OpenCV实现低对比度图像脏污区域检测
目录 1. 低对比度图像脏污区域检测 2. 实现方法介绍 3. C++源码实现 4.结果 总结 参考 1. 低对比度图像脏污区域检测 先上图: 第一张图如果不是标注结果,我都没有发现脏污区域在哪里,第二张图还清晰一些,基本可以看出来图像靠近左边缘的位置有偏暗的区域,这就是我们所说的脏污区域了,也是我们要检测的区域. 标注结果图: 2. 实现方法介绍 这里介绍两种实现方法, 第一种是用C++实现参考博文的方法,即利用梯度方法来检测,具体步骤如下: 对图像进行高斯模糊去噪,梯度计算对噪声很敏感: 调
-
python用opencv批量截取图像指定区域的方法
代码如下 import os import cv2 for i in range(1,201): if i==169 or i==189: i = i+1 pth = "C:\\Users\\Desktop\\asd\\"+str(i)+".bmp" image = cv2.imread(pth) //从指定路径读取图像 cropImg = image[600:1200,750:1500] //获取感兴趣区域 cv2.imwrite("C:\\Users\
-
Python OpenCV基于霍夫圈变换算法检测图像中的圆形
目录 第一章:霍夫变换检测圆 ① 实例演示1 ② 实例演示2 ③ 霍夫变换函数解析 第二章:Python + opencv 完整检测代码 ① 源代码 ② 运行效果图 第一章:霍夫变换检测圆 ① 实例演示1 这个是设定半径范围 0-50 后的效果. ② 实例演示2 这个是设定半径范围 50-70 后的效果,因为原图稍微大一点,半径也大了一些. ③ 霍夫变换函数解析 cv.HoughCircles() 方法 参数分别为:image.method.dp.minDist.param1.param2.mi
-
详解Python+OpenCV进行基础的图像操作
目录 介绍 形态变换 腐蚀 膨胀 创建边框 强度变换 对数变换 线性变换 去噪彩色图像 使用直方图分析图像 介绍 众所周知,OpenCV是一个用于计算机视觉和图像操作的免费开源库. OpenCV 是用 C++ 编写的,并且有数千种优化的算法和函数用于各种图像操作.很多现实生活中的操作都可以使用 OpenCV 来解决.例如视频和图像分析.实时计算机视觉.对象检测.镜头分析等. 许多公司.研究人员和开发人员为 OpenCV 的创建做出了贡献.使用OpenCV 很简单,而且 OpenCV 配备了许多工
-
opencv调整图像亮度对比度的示例代码
图像处理 图像变换就是找到一个函数,把原始图像矩阵经过函数处理后,转换为目标图像矩阵. 可以分为两种方式,即像素级别的变换和区域级别的变换 Point operators (pixel transforms) Neighborhood (area-based) operators 像素级别的变换就相当于\(p_{after}(i,j) = f(p_{before}(i,j))\),即变换后的每个像素值都与变换前的同位置的像素值有个函数映射关系. 对比度和亮度改变 线性变换 最常用的是线性变换.即
-
Python传统图像处理之皮肤区域检测详解
目录 1.RGB空间 2.Ycrcb空间 3.Ycrcb空间+otsu 4.HSV空间 5.opencv自带肤色检测类AdaptiveSkinDetector 6.基于椭圆模型 7.直方图反向投影 1.RGB空间 肤色在RGB模型下的范围基本满足以下约束: 在均匀光照下应满足以下判别式: R>95 AND G>40 B>20 AND MAX(R,G,B)-MIN(R,G,B)>15 AND ABS(R-G)>15 AND R>G AND R>B 在侧光拍摄环境下:
-
C++ OpenCV实战之零部件的自动光学检测
目录 一.背景 二.基础知识 三.代码实现 1.实现多窗口展示 2.降噪处理 3.背景去除 4.连通图实现 5.计算连通域面积 6.轮廓检测 四.总结 一.背景 首先任务背景是AOI(自动光学检测) 最重要的目的在于:将前景和物体进行分割与分类: 场景示意图: 需要注意,在螺母的传送带上,需要有前光和背光,给物体打光才能够拍摄清晰的图像: 二.基础知识 首先分为以下几步: 1.噪声抑制(预处理) 2.背景移除(分割) 3.二值化 4.连通域.轮廓查找算法 降噪算法 先使用中值滤波对椒盐噪声进行过
-
Python+OpenCV实现单个圆形孔和针检测
如果中间红色区域是针则可以用下面的代码检测,其阈值和斑点检测的参数根据图像像素值做相应修改 检测的主要思路是先通过找到外面的大圆,再通过圆心定位出一个ROI区域,在ROI区域中检测中心的检测对象 import os import cv2 import numpy as np import math # 检测针脚位置 def needelCenter_detect(img): params = cv2.SimpleBlobDetector_Params() # Setup SimpleBlobDe
-
Python利用OpenCV和skimage实现图像边缘检测
目录 一.简介 二.opencv 实践 三.skimage 实践 一.简介 提取图片的边缘信息是底层数字图像处理的基本任务之一.边缘信息对进一步提取高层语义信息有很大的影响.大部分边缘检测算法都是上个世纪的了,OpenCV 的使用的算法是 Canny 边缘检测算法,大概是在 1986 年由 John F. Canny 提出了,似乎说明边缘检测算法的研究已经到达了瓶颈期.跟人眼系统相比,边缘检测算法仍然逊色不少. Canny 边缘检测算法是比较出色的算法,也是一种多步算法,可用于检测任何输入图像的