python中的opencv 图像梯度
目录
- 图像梯度
- Sobel理论基础
- 计算水平方向偏导数的近似值
- 计算垂直方向偏导数的近似值
- Sobel算子及函数使用
- 方向
- 计算x方向和y方向的边缘叠加
- Scharr算子及函数使用
- Sobel算子和Scharr算子的比较
- Laplacian算子及函数使用
- 算子总结
图像梯度
图像梯度计算的是图像变化的速度。对于图像的边缘部分,其灰度值变化较大,梯度值也较大;相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小。图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的近似值(近似导数值)。(差分,离散)
Sobel算子、Scharr算子和Laplacian算子的使用。
Sobel理论基础
Sobel算子是一种离散的微分算子,该算子结合了高斯平滑和微分求导运算。该算子利用局部差分寻找边缘,计算所得的是一个梯度的近似值。

滤波器通常是指由一幅图像根据像素点(x, y)临近的区域计算得到另外一幅新图像的算法。
滤波器是由邻域及预定义的操作构成的,滤波器规定了滤波时所采用的形状以及该区域内像素值的组成规律。滤波器也被称为“掩模”、“核”、“模板”、“窗口”、“算子”等。一般信号领域将其称为“滤波器”,数学领域将其称为“核”。
线性滤波器: 滤波的目标像素点的值等于原始像素值及其周围像素值的加权和。这种基于线性核的滤波,就是所熟悉的卷积。
计算水平方向偏导数的近似值
将Sobel算子与原始图像src进行卷积计算,可以计算水平方向上的像素值变化情况。
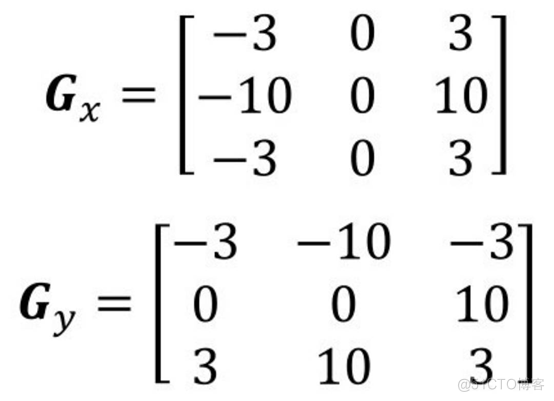
例如,当Sobel算子的大小为3×3时,水平方向偏导数Gx的计算方式为:

计算垂直方向偏导数的近似值
当Sobel算子的大小为3×3时,垂直方向偏导数Gy的计算方式为:

Sobel算子及函数使用
使用函数cv2.Sobel()实现Sobel算子运算,其语法形式为:
dst = cv2.Sobel( src, ddepth, dx, dy[, ksize[, scale[, delta[, borderType]]]] )
- dst代表目标图像
- src代表原始图像
- ddepth代表输出图像的深度

- dx代表x方向上的求导阶数。
- dy代表y方向上的求导阶数。
- ksize代表Sobel核的大小。该值为-1时,则会使用Scharr算子进行运算。
- scale代表计算导数值时所采用的缩放因子,默认情况下该值是1,是没有缩放的。
- delta代表加在目标图像dst上的值,该值是可选的,默认为0。
- borderType代表边界样式。

注意点:参数ddepth
在函数cv2.Sobel()的语法中规定,可以将函数cv2.Sobel()内ddepth参数的值设置为-1,让处理结果与原始图像保持一致。但是,如果直接将参数ddepth的值设置为-1,在计算时得到的结果可能是错误的。
在实际操作中,计算梯度值可能会出现负数。如果处理的图像是8位图类型,则在ddepth的参数值为-1时,意味着指定运算结果也是8位图类型,那么所有负数会自动截断为0,发生信息丢失。为了避免信息丢失,在计算时要先使用更高的数据类型cv2.CV_64F,再通过取绝对值将其映射为cv2.CV_8U(8位图)类型。
通常要将函数cv2.Sobel()内参数ddepth的值设置为“cv2.CV_64F”。
要将偏导数取绝对值,以保证偏导数总能正确地显示出来。
在OpenCV中,使用函数cv2.convertScaleAbs()对参数取绝对值,该函数的语法格式为:
dst = cv2.convertScaleAbs( src [, alpha[, beta]] )
- dst代表处理结果。
- src代表原始图像。
- alpha代表调节系数,该值是可选值,默认为1。
- beta代表调节亮度值,该值是默认值,默认为0。
该函数的作用是将原始图像src转换为256色位图,其可以表示为:
dst=saturate(src*alpha+beta)
式中,saturate()表示计算结果的最大值是饱和值,例如: 当“src*alpha+beta”的值超过255时,其取值为255。
**例子:**使用函数cv2.convertScaleAbs()对一个随机数组取绝对值。
import cv2
import numpy as np
img=np.random.randint(-256,256, size=[4,5], dtype=np.int16)
rst=cv2.convertScaleAbs(img)
print("img=\n", img)
print("rst=\n", rst)
方向
在函数cv2.Sobel()中,参数dx表示x轴方向的求导阶数,参数dy表示y轴方向的求导阶数。参数dx和dy通常的值为0或者1,最大值为2。
如果是0,表示在该方向上没有求导。当然,参数dx和参数dy的值不能同时为0。
参数dx和参数dy可以有多种形式的组合,主要包含:
- 计算x方向边缘(梯度):dx=0, dy=1。
- 计算y方向边缘(梯度):dx=1, dy=0。
- 参数dx与参数dy的值均为1:dx=1, dy=1。
- 计算x方向和y方向的边缘叠加:通过组合方式实现。
例子
“dx=1, dy=0”。当然,也可以设置为“dx=2, dy=0”。此时,会仅仅获取垂直方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 0 )
“dx=0, dy=1”。当然,也可以设置为“dx=0, dy=2”。此时,会仅仅获取水平方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 0 , 1 )
“dx=1, dy=1”,也可以设置为“dx=2, dy=2”,或者两个参数都不为零的其他情况。此时,会获取两个方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 1 )
计算x方向和y方向的边缘叠加
如果想获取x方向和y方向的边缘叠加,需要分别获取水平方向、垂直方向两个方向的边缘图,然后将二者相加。
dx= cv2.Sobel( src , ddepth , 1 , 0 ) dy= cv2.Sobel( src , ddepth , 0 , 1 ) dst=cv2.addWeighted( src1 , alpha , src2 , beta , gamma )
例子:
使用函数cv2.Sobel()获取图像水平方向的完整边缘信息
将参数ddepth的值设置为cv2.CV_64F,并使用函数cv2.convertScaleAbs()对cv2.Sobel()的计算结果取绝对值。
import cv2
o = cv2.imread('Sobel4.bmp', cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o, cv2.CV_64F,0,1)
Sobelx = cv2.convertScaleAbs(Sobelx)
cv2.imshow("original", o)
cv2.imshow("x", Sobelx)
cv2.waitKey()
cv2.destroyAllWindows()
计算函数cv2.Sobel()在水平、垂直两个方向叠加的边缘信息。
import cv2
o = cv2.imread('Sobel4.bmp', cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o, cv2.CV_64F,1,0)
Sobely = cv2.Sobel(o, cv2.CV_64F,0,1)
Sobelx = cv2.convertScaleAbs(Sobelx)
Sobely = cv2.convertScaleAbs(Sobely)
Sobelxy = cv2.addWeighted(Sobelx,0.5, Sobely,0.5,0)
cv2.imshow("original", o)
cv2.imshow("xy", Sobelxy)
cv2.waitKey()
cv2.destroyAllWindows()
Scharr算子及函数使用
在离散的空间上,有很多方法可以用来计算近似导数,在使用3×3的Sobel算子时,可能计算结果并不太精准。
OpenCV提供了Scharr算子,该算子具有和Sobel算子同样的速度,且精度更高。
可以将Scharr算子看作对Sobel算子的改进,其核通常为:
OpenCV提供了函数cv2.Scharr()来计算Scharr算子,其语法格式如下:
dst = cv2.Scharr( src, ddepth, dx, dy[, scale[, delta[, borderType]]] )
- dst代表输出图像。
- src代表原始图像。
- ddepth代表输出图像深度。该值与函数cv2.Sobel()中的参数ddepth的含义相同
- dx代表x方向上的导数阶数。
- dy代表y方向上的导数阶数。
- scale代表计算导数值时的缩放因子,该项是可选项,默认值是1,表示没有缩放。
- delta代表加到目标图像上的亮度值,该项是可选项,默认值为0。
- borderType代表边界样式。
在函数cv2.Sobel()中,如果ksize=-1,则会使用Scharr滤波器。
如下语句:
dst=cv2.Scharr(src, ddepth, dx, dy)
和
dst=cv2.Sobel(src, ddepth, dx, dy, -1)
是等价的。函数cv2.Scharr()和函数cv2.Sobel()的使用方式基本一致。参数ddepth的值应该设置为“cv2.CV_64F”,并对函数cv2.Scharr()的计算结果取绝对值,才能保证得到正确的处理结果。
具体语句为:
dst=Scharr(src, cv2.CV_64F, dx, dy) dst= cv2.convertScaleAbs(dst)
在函数cv2.Scharr()中,要求参数dx和dy满足条件:
- dx >= 0 && dy >= 0 && dx+dy == 1
- 和Sobel 不同, Scharr 的dx+dy 必须为1
参数dx和参数dy的组合形式有:
- 计算x方向边缘(梯度):dx=0, dy=1。
- 计算y方向边缘(梯度): dx=1, dy=0。
- 计算x方向与y方向的边缘叠加:通过组合方式实现。
例子
计算x方向边缘(梯度):dx=1, dy=0
dst=Scharr(src, ddpeth, dx=1, dy=0)
计算y方向边缘(梯度):dx=0, dy=1
dst=Scharr(src, ddpeth, dx=0, dy=1)
计算x方向与y方向的边缘叠加
将两个方向的边缘相加
dx=Scharr(src, ddpeth, dx=1, dy=0) dy=Scharr(src, ddpeth, dx=0, dy=1) Scharrxy=cv2.addWeighted(dx,0.5, dy,0.5,0)
参数dx和dy的值不能都为1
Sobel算子和Scharr算子的比较
Sobel算子的缺点是,当其核结构较小时,精确度不高,而Scharr算子具有更高的精度。
Sobel算子和Scharr算子的核结构:

Laplacian算子及函数使用
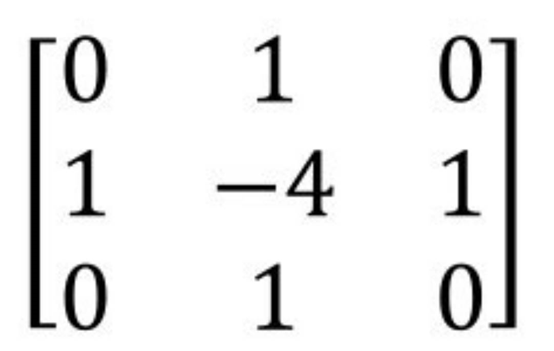
Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。
通常情况下,其算子的系数之和需要为零。
一个3×3大小的Laplacian算子

Laplacian算子类似二阶Sobel导数,需要计算两个方向的梯度值。
计算结果的值可能为正数,也可能为负数。所以,需要对计算结果取绝对值,以保证后续运算和显示都是正确的。
在OpenCV内使用函数cv2.Laplacian()实现Laplacian算子的计算,该函数的语法格式为:
dst = cv2.Laplacian( src, ddepth[, ksize[, scale[, delta[, borderType]]]] )
- dst代表目标图像。
- src代表原始图像。
- ddepth代表目标图像的深度。
- ksize代表用于计算二阶导数的核尺寸大小。该值必须是正的奇数。
- scale代表计算Laplacian值的缩放比例因子,该参数是可选的。默认情况下,该值为1,表示不进行缩放。
- delta代表加到目标图像上的可选值,默认为0。
- borderType代表边界样式。
该函数分别对x、y方向进行二次求导,具体为:

上式是当ksize的值大于1时的情况。当ksize的值为1时,Laplacian算子计算时采用的3×3的核如下:
通过从图像内减去它的Laplacian图像,可以增强图像的对比度,此时其算子为:

例子: 使用函数cv2.Laplacian()计算图像的边缘信息。
import cv2
o = cv2.imread('Laplacian.bmp', cv2.IMREAD_GRAYSCALE)
Laplacian = cv2.Laplacian(o, cv2.CV_64F)
Laplacian = cv2.convertScaleAbs(Laplacian)
cv2.imshow("original", o)
cv2.imshow("Laplacian", Laplacian)
cv2.waitKey()
cv2.destroyAllWindows()
算子总结
Sobel算子、Scharr算子、Laplacian算子都可以用作边缘检测

Sobel算子和Scharr算子计算的都是一阶近似导数的值。通常情况下,可以将它们表示为:
- Sobel算子= |左-右| 或 |下-上|
- Scharr算子=|左-右| 或 |下-上|
Laplacian算子计算的是二阶近似导数值,可以将它表示为:
- Laplacian算子=|中-左| + |中-右| + |中-下| + |中-上|
到此这篇关于python中的opencv 图像梯度的文章就介绍到这了,更多相关python opencv 内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

OpenCV-Python实现图像梯度与Sobel滤波器
图像梯度 图像梯度计算的是图像变化的速度.对于图像的边缘部分,其灰度值变化较大,梯度值也较大:相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小.一般情况下,图像的梯度计算是图像的边缘信息. 其实梯度就是导数,但是图像梯度一般通过计算像素值的差来得到梯度的近似值,也可以说是近似导数.该导数可以用微积分来表示. 在微积分中,一维函数的一阶微分的基本定义是这样的: 而图像是一个二维函数f(x,y),其微分当然就是偏微分.因此有: 因为图像是一个离散的二维函数,ϵ不能无限小,我们的图
-
opencv python图像梯度实例详解
这篇文章主要介绍了opencv python图像梯度实例详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 一阶导数与Soble算子 二阶导数与拉普拉斯算子 图像边缘: Soble算子: 二阶导数: 拉普拉斯算子: import cv2 as cv import numpy as np # 图像梯度(由x,y方向上的偏导数和偏移构成),有一阶导数(sobel算子)和二阶导数(Laplace算子) # 用于求解图像边缘,一阶的极大值,二阶的零点
-
python中的opencv 图像梯度
目录 图像梯度 Sobel理论基础 计算水平方向偏导数的近似值 计算垂直方向偏导数的近似值 Sobel算子及函数使用 方向 计算x方向和y方向的边缘叠加 Scharr算子及函数使用 Sobel算子和Scharr算子的比较 Laplacian算子及函数使用 算子总结 图像梯度 图像梯度计算的是图像变化的速度.对于图像的边缘部分,其灰度值变化较大,梯度值也较大:相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小.图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的
-
OpenCV 图像梯度的实现方法
目录 概述 梯度运算 礼帽 黑帽 Sobel 算子 计算 x 计算 y 计算 x+y 融合 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 梯度运算 梯度: 膨胀 (Dilating) - 腐蚀 (Eroding). 例子: # 读取图片 pie = cv2.imread("pie.png") # 核 kernel = np.ones((7, 7), np.uint8) # 计算梯度 gradient =
-
详解在Python中使用OpenCV进行直线检测
目录 1.引言 2.霍夫变换 3.举个栗子 3.1读入图像进行灰度化 3.2执行边缘检测 3.3进行霍夫变换 补充 1. 引言 在图像处理中,直线检测是一种常见的算法,它通常获取n个边缘点的集合,并找到通过这些边缘点的直线.其中用于直线检测,最为流行的检测器是基于霍夫变换的直线检测技术. 2. 霍夫变换 霍夫变换是图像处理中的一种特征提取方法,可以识别图像中的几何形状.它将在参数空间内进行投票来决定其物体形状,通过检测累计结果找到一极大值所对应的解,利用此解即可得到一个符合特定形状的参数. 在使
-
Python中使用Opencv开发停车位计数器功能
目录 1. 环境安装 1.1 安装并激活虚拟环境 1.2 python包安装 2. 绘制停车位矩形框 2.1 导入停车场图片 2.2 绘制矩形框 定位停车位 2.3 鼠标添加.删除停车位 3. 停车位视频分析 3. 1 停车监控视频 3. 2 截取停车位 3. 3 图像处理 3. 4 判断停车位是否被占用 在这个项目中,我们将创建一个停车位计数器.我们会发现总共有多少辆车,以及有多少停车位是空的.关于本教程最好的一点是,我们将使用基本的图像处理技术来解决这个问题,没有使用机器学习.深度学习进行训
-
python中的opencv 图像分割与提取
目录 图像分割与提取 用分水岭算法实现图像分割与提取 算法原理 相关函数介绍 分水岭算法图像分割实例 交互式前景提取 图像分割与提取 图像中将前景对象作为目标图像分割或者提取出来.对背景本身并无兴趣分水岭算法及GrabCut算法对图像进行分割及提取. 用分水岭算法实现图像分割与提取 分水岭算法将图像形象地比喻为地理学上的地形表面,实现图像分割,该算法非常有效. 算法原理 任何一幅灰度图像,都可以被看作是地理学上的地形表面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷. 左图是原
-
在python中画正态分布图像的实例
1.正态分布简介 正态分布(normal distribtution)又叫做高斯分布(Gaussian distribution),是一个非常重要也非常常见的连续概率分布.正态分布大家也都非常熟悉,下面做一些简单的介绍. 假设随机变量XX服从一个位置参数为μμ.尺度参数为σσ的正态分布,则可以记为: 而概率密度函数为 2.在python中画正态分布直方图 先直接上代码 import numpy as np import matplotlib.mlab as mlab import matplot
-
在python中利用opencv简单做图片比对的方法
下面代码中利用了两种比对的方法,一 对图片矩阵(m x m)求解特征值,通过比较特征值是否在一定的范围内,判断图片是否相同.二 对图片矩阵(m x m)中1求和,通过比较sum和来比较图片. # -*- coding: utf-8 -*- import cv2 as cv import numpy as np import os file_dir_a='C:\Users\wt\Desktop\data\image1\\' file_dir_b='C:\Users\wt\Desktop\data\
-
Python中使用OpenCV库来进行简单的气象学遥感影像计算
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库.OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用.OpenCV可用于开发实时的图像处理.计算机视觉以及模式识别程序.该程序库也可以使用英特尔公司的IPP进行加速处理. OpenCV用C++语言编写,它的主要接口也是C++语言,但是依然保留了大量的C语言接口.该库也有大量的Python, Java and MATLAB/OCTAVE
-
树莓派用python中的OpenCV输出USB摄像头画面
本文实例为大家分享了python OpenCV来表示USB摄像头画面的具体代码,供大家参考,具体内容如下 确认Python版本 $ python Python 2.7.13 (default, Jan 19 2019, 14:48:08) [GCC 6.3.0 20170124] on linux2 Type "help", "copyright", "credits" or "license" for more inform
-
python中的opencv和PIL(pillow)转化操作
opencv > pil import cv2 from PIL import Image img = cv2.imread("test.png") image = Image.fromarray(cv2.cvtColor(img,cv2.COLOR_BGR2RGB)) pil > opencv import cv2 from PIL import Image image = Image.open("test.png") img = cv2.cvtCol