对Tensorflow中权值和feature map的可视化详解
前言
Tensorflow中可以使用tensorboard这个强大的工具对计算图、loss、网络参数等进行可视化。本文并不涉及对tensorboard使用的介绍,而是旨在说明如何通过代码对网络权值和feature map做更灵活的处理、显示和存储。本文的相关代码主要参考了github上的一个小项目,但是对其进行了改进。
原项目地址为(https://github.com/grishasergei/conviz)。
本文将从以下两个方面进行介绍:
卷积知识补充
网络权值和feature map的可视化
1. 卷积知识补充
为了后面方便讲解代码,这里先对卷积的部分知识进行一下简介。关于卷积核如何在图像的一个通道上进行滑动计算,网上有诸多资料,相信对卷积神经网络有一定了解的读者都应该比较清楚,本文就不再赘述。这里主要介绍一组卷积核如何在一幅图像上计算得到一组feature map。
以从原始图像经过第一个卷积层得到第一组feature map为例(从得到的feature map到再之后的feature map也是同理),假设第一组feature map共有64个,那么可以把这组feature map也看作一幅图像,只不过它的通道数是64, 而一般意义上的图像是RGB3个通道。为了得到这第一组feature map,我们需要64个卷积核,每个卷积核是一个k x k x 3的矩阵,其中k是卷积核的大小(假设是正方形卷积核),3就对应着输入图像的通道数。下面我以一个简单粗糙的图示来展示一下图像经过一个卷积核的卷积得到一个feature map的过程。
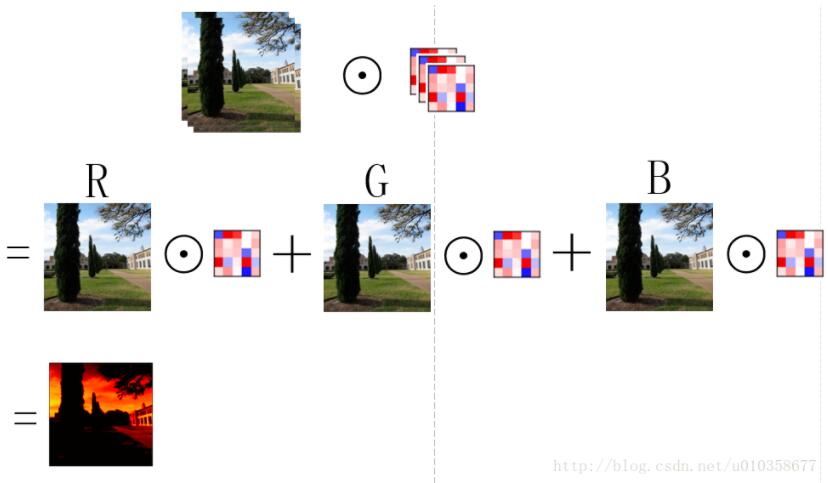
如图所示,其实可以看做卷积核的每一通道(不太准确,将就一下)和图像的每一通道对应进行卷积操作,然后再逐位置相加,便得到了一个feature map。
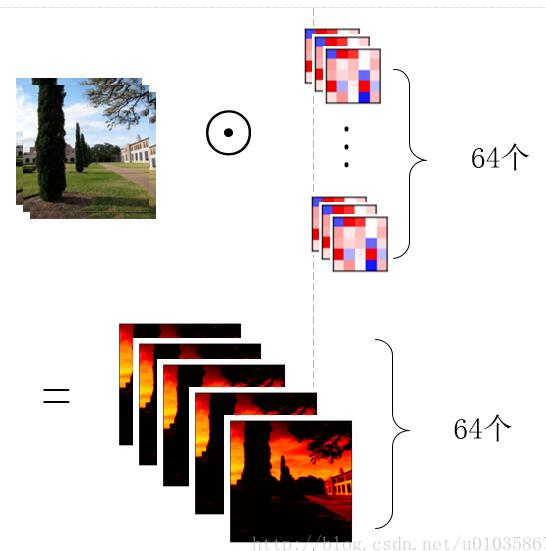
那么用一组(64个)卷积核去卷积一幅图像,得到64个feature map就如下图所示,也就是每个卷积核得到一个feature map,64个卷积核就得到64个feature map。
另外,也可以稍微换一个角度看待这个问题,那就是先让图片的某一通道分别与64个卷积核的对应通道做卷积,得到64个feature map的中间结果,之后3个通道对应的中间结果再相加,得到最终的feature map,如下图所示:
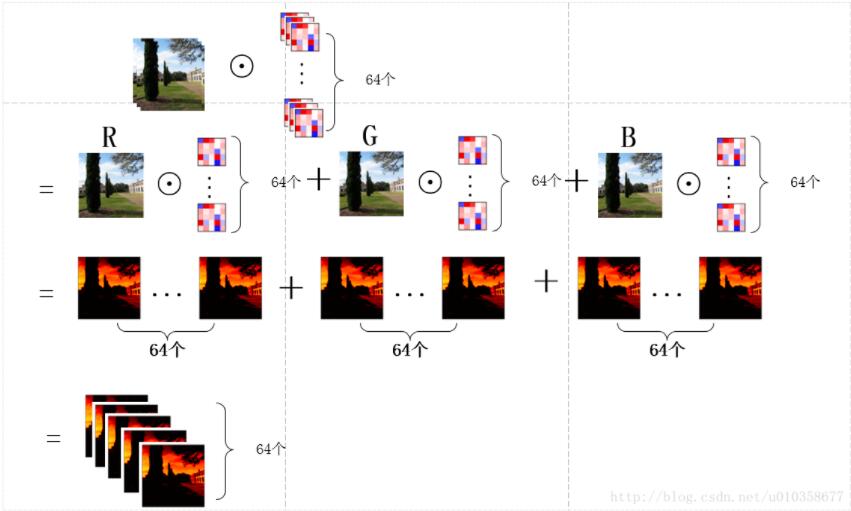
可以看到这其实就是第一幅图扩展到多卷积核的情形,图画得较为粗糙,有些中间结果和最终结果直接用了一样的子图,理解时请稍微注意一下。下面代码中对卷积核进行展示的时候使用的就是这种方式,即对应着输入图像逐通道的去显示卷积核的对应通道,而不是每次显示一个卷积核的所有通道,可能解释的有点绕,需要注意一下。通过下面这个小图也许更好理解。
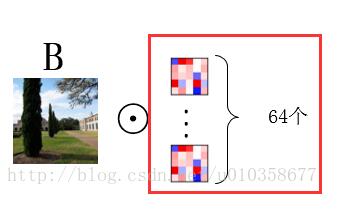
图中用红框圈出的部分即是我们一次展示出的权重参数。
2. 网络权值和feature map的可视化
(1) 网络权重参数可视化
首先介绍一下Tensorflow中卷积核的形状,如下代码所示:
weights = tf.Variable(tf.random_normal([filter_size, filter_size, channels, filter_num]))
前两维是卷积核的高和宽,第3维是上一层feature map的通道数,在第一节(卷积知识补充)中,我提到了上一层的feature map有多少个(也就是通道数是多少),那么对应着一个卷积核也要有这么多通道。第4维是当前卷积层的卷积核数量,也是当前层输出的feature map的通道数。
以下是我更改之后的网络权重参数(卷积核)的可视化代码:
from __future__ import print_function
#import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.cm as cm
import os
import visualize_utils
def plot_conv_weights(weights, plot_dir, name, channels_all=True, filters_all=True, channels=[0], filters=[0]):
"""
Plots convolutional filters
:param weights: numpy array of rank 4
:param name: string, name of convolutional layer
:param channels_all: boolean, optional
:return: nothing, plots are saved on the disk
"""
w_min = np.min(weights)
w_max = np.max(weights)
# make a list of channels if all are plotted
if channels_all:
channels = range(weights.shape[2])
# get number of convolutional filters
if filters_all:
num_filters = weights.shape[3]
filters = range(weights.shape[3])
else:
num_filters = len(filters)
# get number of grid rows and columns
grid_r, grid_c = visualize_utils.get_grid_dim(num_filters)
# create figure and axes
fig, axes = plt.subplots(min([grid_r, grid_c]),
max([grid_r, grid_c]))
# iterate channels
for channel_ID in channels:
# iterate filters inside every channel
if num_filters == 1:
img = weights[:, :, channel_ID, filters[0]]
axes.imshow(img, vmin=w_min, vmax=w_max, interpolation='nearest', cmap='seismic')
# remove any labels from the axes
axes.set_xticks([])
axes.set_yticks([])
else:
for l, ax in enumerate(axes.flat):
# get a single filter
img = weights[:, :, channel_ID, filters[l]]
# put it on the grid
ax.imshow(img, vmin=w_min, vmax=w_max, interpolation='nearest', cmap='seismic')
# remove any labels from the axes
ax.set_xticks([])
ax.set_yticks([])
# save figure
plt.savefig(os.path.join(plot_dir, '{}-{}.png'.format(name, channel_ID)), bbox_inches='tight')
原项目的代码是对某一层的权重参数或feature map在一个网格中进行全部展示,如果参数或feature map太多,那么展示出来的结果中每个图都很小,很难看出有用的东西来,如下图所示:
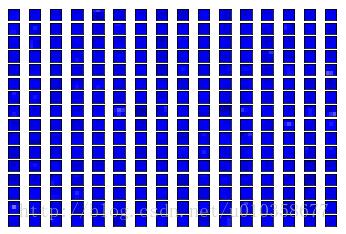
所以我对代码做了些修改,使得其能显示任意指定的filter或feature map。
代码中,
w_min = np.min(weights) w_max = np.max(weights)
这两句是为了后续显示图像用的,具体可查看matplotlib.pyplot的imshow()函数进行了解。
接下来是判断是否显示全部的channel(通道数)或全部filter。如果是,那就和原代码一致了。若不是,则画出函数参数channels和filters指定的filter来。
再往下的两句代码是画图用的,我们可能会在一个图中显示多个子图,以下这句是为了计算出大图分为几行几列比较合适(一个大图会尽量分解为方形的阵列,比如如果有64个子图,那么就分成8 x 8的阵列),代码细节可在原项目中的utils中找到。
grid_r, grid_c = visualize_utils.get_grid_dim(num_filters)
实际画图时,如果想要一个图一个图的去画,需要单独处理一下。如果还是想在一个大图中显示多个子图,就按源代码的方式去做,只不过这里可以显示我们自己指定的那些filter,而不是不加筛选地全部输出。主要拿到数据的是以下这句代码:
img = weights[:, :, channel_ID, filters[l]]
剩下的都是是画图相关的函数了,本文就不再对画图做更多介绍了。
使用这段代码可视化并保存filter时,先加载模型,然后拿到我们想要可视化的那部分参数,之后直接调用函数就可以了,如下所示:
with tf.Session(graph=tf.get_default_graph()) as sess:
init_op = tf.group(tf.global_variables_initializer(), tf.local_variables_initializer())
sess.run(init_op)
saver.restore(sess, model_path)
with tf.variable_scope('inference', reuse=True):
conv_weights = tf.get_variable('conv3_1_w').eval()
visualize.plot_conv_weights(conv_weights, dir_prefix, 'conv3_1')
这里并没有对filter进行额外的指定,在feature map的可视化中,我会给出相关例子。
(2) feature map可视化
其实feature map的可视化与filter非常相似,只有细微的不同。还是先把完整代码贴上。
def plot_conv_output(conv_img, plot_dir, name, filters_all=True, filters=[0]):
w_min = np.min(conv_img)
w_max = np.max(conv_img)
# get number of convolutional filters
if filters_all:
num_filters = conv_img.shape[3]
filters = range(conv_img.shape[3])
else:
num_filters = len(filters)
# get number of grid rows and columns
grid_r, grid_c = visualize_utils.get_grid_dim(num_filters)
# create figure and axes
fig, axes = plt.subplots(min([grid_r, grid_c]),
max([grid_r, grid_c]))
# iterate filters
if num_filters == 1:
img = conv_img[0, :, :, filters[0]]
axes.imshow(img, vmin=w_min, vmax=w_max, interpolation='bicubic', cmap=cm.hot)
# remove any labels from the axes
axes.set_xticks([])
axes.set_yticks([])
else:
for l, ax in enumerate(axes.flat):
# get a single image
img = conv_img[0, :, :, filters[l]]
# put it on the grid
ax.imshow(img, vmin=w_min, vmax=w_max, interpolation='bicubic', cmap=cm.hot)
# remove any labels from the axes
ax.set_xticks([])
ax.set_yticks([])
# save figure
plt.savefig(os.path.join(plot_dir, '{}.png'.format(name)), bbox_inches='tight')
代码中和filter可视化相同的部分就不再赘述了,这里只讲feature map可视化独特的方面,其实就在于以下这句代码,也就是要可视化的数据的获得:
img = conv_img[0, :, :, filters[0]]
神经网络一般都是一个batch一个batch的输入数据,其输入的形状为
image = tf.placeholder(tf.float32, shape = [None, IMAGE_SIZE, IMAGE_SIZE, 3], name = "input_image")
第一维是一个batch中图片的数量,为了灵活可以设置为None,Tensorflow会根据实际输入的数据进行计算。二三维是图片的高和宽,第4维是图片通道数,一般为3。
如果我们想要输入一幅图片,然后看看它的激活值(feature map),那么也要按照以上维度以一个batch的形式进行输入,也就是[1, IMAGE_SIZE, IMAGE_SIZE, 3]。所以拿feature map数据时,第一维度肯定是取0(就对应着batch中的当前图片),二三维取全部,第4维度再取我们想要查看的feature map的某一通道。
如果想要可视化feature map,那么构建网络时还要动点手脚,定义计算图时,每得到一组激活值都要将其加到Tensorflow的collection中,如下:
tf.add_to_collection('activations', current)
而实际进行feature map可视化时,就要先输入一幅图片,然后运行网络拿到相应数据,最后把数据传参给可视化函数。以下这个例子展示的是如何将每个指定卷积层的feature map的每个通道进行单独的可视化与存储,使用的是VGG16网络:
visualize_layers = ['conv1_1', 'conv1_2', 'conv2_1', 'conv2_2', 'conv3_1', 'conv3_2', 'conv3_3', 'conv4_1', 'conv4_2', 'conv4_3', 'conv5_1', 'conv5_2', 'conv5_3']
with tf.Session(graph=tf.get_default_graph()) as sess:
init_op = tf.group(tf.global_variables_initializer(), tf.local_variables_initializer())
sess.run(init_op)
saver.restore(sess, model_path)
image_path = root_path + 'images/train_images/sunny_0058.jpg'
img = misc.imread(image_path)
img = img - meanvalue
img = np.float32(img)
img = np.expand_dims(img, axis=0)
conv_out = sess.run(tf.get_collection('activations'), feed_dict={x: img, keep_prob: 1.0})
for i, layer in enumerate(visualize_layers):
visualize_utils.create_dir(dir_prefix + layer)
for j in range(conv_out[i].shape[3]):
visualize.plot_conv_output(conv_out[i], dir_prefix + layer, str(j), filters_all=False, filters=[j])
sess.close()
其中,conv_out包含了所有加入到collection中的feature map,这些feature map在conv_out中是按卷积层划分的。
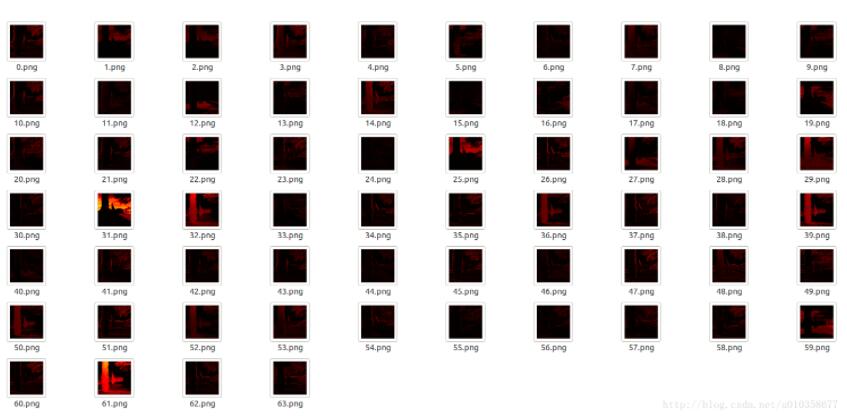
最终得到的结果如下图所示:

第一个文件夹下的全部结果:
以上这篇对Tensorflow中权值和feature map的可视化详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-

利用Python代码实现数据可视化的5种方法详解
前言 数据科学家并不逊色于艺术家.他们用数据可视化的方式绘画,试图展现数据内隐藏的模式或表达对数据的见解.更有趣的是,一旦接触到任何可视化的内容.数据时,人类会有更强烈的知觉.认知和交流. 数据可视化是数据科学家工作中的重要组成部分.在项目的早期阶段,你通常会进行探索性数据分析(Exploratory Data Analysis,EDA)以获取对数据的一些理解.创建可视化方法确实有助于使事情变得更加清晰易懂,特别是对于大型.高维数据集.在项目结束时,以清晰.简洁和引人注目的方式展现最终结果是非常
-
利用Python进行数据可视化常见的9种方法!超实用!
前言 如同艺术家们用绘画让人们更贴切的感知世界,数据可视化也能让人们更直观的传递数据所要表达的信息. 我们今天就分享一下如何用 Python 简单便捷的完成数据可视化. 其实利用 Python 可视化数据并不是很麻烦,因为 Python 中有两个专用于可视化的库 matplotlib 和 seaborn 能让我们很容易的完成任务. Matplotlib:基于Python的绘图库,提供完全的 2D 支持和部分 3D 图像支持.在跨平台和互动式环境中生成高质量数据时,matplotlib 会很有帮助
-
Python matplotlib绘图可视化知识点整理(小结)
无论你工作在什么项目上,IPython都是值得推荐的.利用ipython --pylab,可以进入PyLab模式,已经导入了matplotlib库与相关软件包(例如Numpy和Scipy),额可以直接使用相关库的功能. 本文作为学习过程中对matplotlib一些常用知识点的整理,方便查找. 这样IPython配置为使用你所指定的matplotlib GUI后端(TK/wxPython/PyQt/Mac OS X native/GTK).对于大部分用户而言,默认的后端就已经够用了.Pylab模式
-
通过python的matplotlib包将Tensorflow数据进行可视化的方法
使用matplotlib中的一些函数将tensorflow中的数据可视化,更加便于分析 import tensorflow as tf import numpy as np import matplotlib.pyplot as plt def add_layer(inputs, in_size, out_size, activation_function=None): Weights = tf.Variable(tf.random_normal([in_size, out_size])) bi
-
Tensorflow 自带可视化Tensorboard使用方法(附项目代码)
Tensorboard: 如何更直观的观察数据在神经网络中的变化,或是已经构建的神经网络的结构.上一篇文章说到,可以使用matplotlib第三方可视化,来进行一定程度上的可视化.然而Tensorflow也自带了可视化模块Tensorboard,并且能更直观的看见整个神经网络的结构. 上面的结构图甚至可以展开,变成: 使用: 结构图: with tensorflow .name_scope(layer_name): 直接使用以上代码生成一个带可展开符号的一个域,并且支持嵌套操作: with tf
-
基于Python数据可视化利器Matplotlib,绘图入门篇,Pyplot详解
Pyplot matplotlib.pyplot是一个命令型函数集合,它可以让我们像使用MATLAB一样使用matplotlib.pyplot中的每一个函数都会对画布图像作出相应的改变,如创建画布.在画布中创建一个绘图区.在绘图区上画几条线.给图像添加文字说明等.下面我们就通过实例代码来领略一下他的魅力. import matplotlib.pyplot as plt plt.plot([1,2,3,4]) plt.ylabel('some numbers') plt.show() 上图是我们通
-
对Tensorflow中权值和feature map的可视化详解
前言 Tensorflow中可以使用tensorboard这个强大的工具对计算图.loss.网络参数等进行可视化.本文并不涉及对tensorboard使用的介绍,而是旨在说明如何通过代码对网络权值和feature map做更灵活的处理.显示和存储.本文的相关代码主要参考了github上的一个小项目,但是对其进行了改进. 原项目地址为(https://github.com/grishasergei/conviz). 本文将从以下两个方面进行介绍: 卷积知识补充 网络权值和feature map的可
-
js中bool值的转换及“&&”、“||”、 “!!”详解
前言 首先需要知道的是,js中有6个值为false,分别是: 0, '', null, undefined, NaN 和 false, 其他(包括{}, [], Infinity)为true. 可以使用Boolean()函数或是两次取非就能获得对象的布尔值,例如Boolean(undefined)和!!undefined同样能取得布尔值false, 对于0, '', null, undefined, NaN,{}, [], Infinity求布尔值,分别是false false false fa
-
TensorFlow的权值更新方法
一. MovingAverage权值滑动平均更新 1.1 示例代码: def create_target_q_network(self,state_dim,action_dim,net): state_input = tf.placeholder("float",[None,state_dim]) action_input = tf.placeholder("float",[None,action_dim]) ema = tf.train.ExponentialMo
-
python中的map函数语法详解
目录 1map()函数的简介以及语法: 2map()函数实例: 1 map()函数的简介以及语法: map是python内置函数,会根据提供的函数对指定的序列做映射. map()函数的格式是: map(function,iterable,...) 第一个参数接受一个函数名,后面的参数接受一个或多个可迭代的序列,返回的是一个集合. 把函数依次作用在list中的每一个元素上,得到一个新的list并返回.注意,map不改变原list,而是返回一个新list. 2 map()函数实例: del squa
-
C语言中 值传递和指针传递实例详解
C语言中 值传递和指针传递实例详解 在C语言中,函数的参数和返回值的传递方式有两种:值传递和指针传递. 值传递和指针传递初学者总会有一种朦胧的感觉,所以建议把指针传递的概念摸透,才能熟练应用. 值传递示例:x其实是n的一份临时拷贝,所以并不会改变n的值. #include <stdio.h> #include <windows.h> void Fun(int x) { x = 1; } int main() { int n = 2; Fun(n); printf("%d\
-
对Python中DataFrame选择某列值为XX的行实例详解
如下所示: #-*-coding:utf8-*- import pandas as pd all_data=pd.read_csv("E:/协和问答系统/SenLiu/熵测试数据.csv") #获取某一列值为xx的行的候选列数据 print(all_data) feature_data=all_data.iloc[:,[0,-1]][all_data[all_data.T.index[0]]=='青年'] print(feature_data) 实验结果如下: "C:\Pro
-
对python中词典的values值的修改或新增KEY详解
在python中,对词典的值,可以新增,或者修改,如下: 以上这篇对python中词典的values值的修改或新增KEY详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们.
-
tensorflow入门:TFRecordDataset变长数据的batch读取详解
在上一篇文章tensorflow入门:tfrecord 和tf.data.TFRecordDataset的使用里,讲到了使用如何使用tf.data.TFRecordDatase来对tfrecord文件进行batch读取,即使用dataset的batch方法进行:但如果每条数据的长度不一样(常见于语音.视频.NLP等领域),则不能直接用batch方法获取数据,这时则有两个解决办法: 1.在把数据写入tfrecord时,先把数据pad到统一的长度再写入tfrecord:这个方法的问题在于:若是有大量
-
Java中的引用和动态代理的实现详解
我们知道,动态代理(这里指JDK的动态代理)与静态代理的区别在于,其真实的代理类是动态生成的.但具体是怎么生成,生成的代理类包含了哪些内容,以什么形式存在,它为什么一定要以接口为基础? 如果去看动态代理的源代码(java.lang.reflect.Proxy),会发现其原理很简单(真正二进制类文件的生成是在本地方法中完成,源代码中没有),但其中用到了一个缓冲类java.lang.reflect.WeakCache<ClassLoader,Class<?>[],Class<?>
-
基于Java中最常用的集合类框架之HashMap(详解)
一.HashMap的概述 HashMap可以说是Java中最常用的集合类框架之一,是Java语言中非常典型的数据结构. HashMap是基于哈希表的Map接口实现的,此实现提供所有可选的映射操作.存储的是对的映射,允许多个null值和一个null键.但此类不保证映射的顺序,特别是它不保证该顺序恒久不变. 除了HashMap是非同步以及允许使用null外,HashMap 类与 Hashtable大致相同. 此实现假定哈希函数将元素适当地分布在各桶之间,可为基本操作(get 和 put)提供稳定的性