OpenCV实现图像连通域
图像的连通域是指图像中具有相同像素值并且位置相邻的像素组成的区域,连通域分析是指在图像中寻找出彼此互相独立的连通域并将其标记出来。
一般情况下,一个连通域内只包含一个像素值,因此为了防止像素值波动对提取不同连通域的影响,连通域分析常处理的是二值化后的图像。
4-邻域和8-邻域:
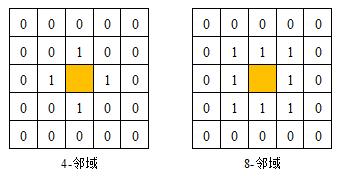
常用的图像邻域分析法有两遍扫描法和种子填充法。两遍扫描法会遍历两次图像,第一次遍历图像时会给每一个非0像素赋予一个数字标签,当某个像素的上方和左侧邻域内的像素已经有数字标签时,取两者中的最小值作为当前像素的标签,否则赋予当前像素一个新的数字标签。第一次遍历图像的时候同一个连通域可能会被赋予一个或者多个不同的标签。
种子填充法源于计算机图像学,常用于对某些图形进行填充。该方法首先将所有非0像素放到一个集合中,之后在集合中随机选出一个像素作为种子像素,根据邻域关系不断扩充种子像素所在的连通域,并在集合中删除掉扩充出的像素,直到种子像素所在的连通域无法扩充,之后再从集合中随机选取一个像素作为新的种子像素,重复上述过程直到集合中没有像素。
CV_EXPORTS_AS(connectedComponentsWithAlgorithm) int connectedComponents(InputArray image, OutputArray labels,
int connectivity, int ltype, int ccltype);
- image:待标记不同连通域的单通道图像,数据类型必须为CV_8U。
- labels:标记不同连通域后的输出图像,与输入图像具有相同的尺寸。
- connectivity:标记连通域时使用的邻域种类,4表示4-邻域,8表示8-邻域。
- ltype:输出图像的数据类型,目前支持CV_32S和CV_16U两种数据类型。
- ccltype:标记连通域时使用的算法类型标志,可以选择的参数及含义在表中给出

该函数用于计算二值图像中连通域的个数,并在图像中将不同的连通域用不同的数字标签标记出,其中标签0表示图像中的背景区域,同时函数具有一个int类型的返回数据,用于表示图像中连通域的数目。函数的第一个参数是待标记连通域的输入图像,函数要求输入图像必须是数据类型为CV_8U的单通道灰度图像,而且最好是经过二值化的二值图像。函数第二个参数是标记连通域后的输出图像,图像尺寸与第一个参数的输入图像尺寸相同,图像的数据类型与函数的第四个参数相关。函数第三个参数是统计连通域时选择的邻域种类,函数支持两种邻域,分别用4表示4-邻域,8表示8-邻域。函数第四个参数为输出图像的数据类型,可以选择的参数为CV_32S和CV_16U两种。函数的最后一个参数是标记连通域时使用算法的标志,可以选择的参数及含义在表给出,目前只支持Grana(BBDT)和Wu(SAUF)两种算法。
OpenCV 还给出了简单的函数形式
int connectedComponents(InputArray image, OutputArray labels,
int connectivity = 8, int ltype = CV_32S);
- image:待标记不同连通域的图像单通道,数据类型必须为CV_8U。
- labels:标记不同连通域后的输出图像,与输入图像具有相同的尺寸。
- connectivity:标记连通域时使用的邻域种类,4表示4-邻域,8表示8-邻域,默认参数为8。
- ltype:输出图像的数据类型,目前支持CV_32S和CV_16U两种数据类型,默认参数为CV_32S。
该函数原型只有四个参数,前两个参数分别表示输入图像和输出图像,第三个参数表示统计连通域时选择的邻域种类,分别用4表示4-邻域,8表示8-邻域,参数的默认值为8。最后一个参数表示输出图像的数据类型,可以选择的参数为CV_32S和CV_16U两种,参数的默认值为CV_32S。该函数原型有两个参数具有默认值,在使用时最少只需要两个参数,极大的方便了函数的调用。
进一步统计每个连通域的中心位置、矩形区域大小、区域面积等信息
复杂的
CV_EXPORTS_AS(connectedComponentsWithStatsWithAlgorithm) int connectedComponentsWithStats(InputArray image, OutputArray labels,
OutputArray stats, OutputArray centroids,
int connectivity, int ltype, int ccltype);
- image:待标记不同连通域的单通道图像,数据类型必须为CV_8U。
- labels:标记不同连通域后的输出图像,与输入图像具有相同的尺寸。
- stats:含有不同连通域统计信息的矩阵,矩阵的数据类型为CV_32S。矩阵中第i行是标签为i的连通域的统计特性,存储的统计信息种类在表6-4中给出。
- centroids:每个连通域的质心坐标,数据类型为CV_64F。
- connectivity:标记连通域时使用的邻域种类,4表示4-邻域,8表示8-邻域。
- ltype:输出图像的数据类型,目前支持CV_32S和CV_16U两种数据类型。
- ccltype:标记连通域使用的算法类型标志,可以选择的参数及含义在表中给出。
该函数能够在图像中不同连通域标记标签的同时统计每个连通域的中心位置、矩形区域大小、区域面积等信息。函数的前两个参数含义与connectedComponents()函数的前两个参数含义一致,都是输入图像和输出图像。函数的第三个参数为每个连通域统计信息矩阵,如果图像中有N个连通域,那么该参数输出的矩阵尺寸为N×5,矩阵中每一行分别保存每个连通域的统计特性,详细的统计特性在表中给出,如果想读取包含第i个连通域的边界框的水平长度,可以通过stats.at(i, CC_STAT_WIDTH)或者stats.at(i, 0)进行读取。函数的第四个参数为每个连通域质心的坐标,如果图像中有N个连通域,那么该参数输出的矩阵尺寸为N×2,矩阵中每一行分别保存每个连通域质心的x坐标和y坐标,可以通过centroids.at(i, 0)和 centroids.at(i, 1) 分别读取第i个连通域质心的x坐标和y坐标。函数第五个参数是统计连通域时选择的邻域种类,函数支持两种邻域,分别用4表示4-邻域,8表示8-邻域。函数第六个参数为输出图像的数据类型,可以选择的参数为CV_32S和CV_16U两种。函数的最后一个参数是标记连通域使用的算法,可以选择的参数在上表给出,目前只支持Grana(BBDT)和Wu(SAUF)两种算法。

简单的
int connectedComponentsWithStats(InputArray image, OutputArray labels,
OutputArray stats, OutputArray centroids,
int connectivity = 8, int ltype = CV_32S);
- image:待标记不同连通域的单通道图像,数据类型必须为CV_8U。
- labels:标记不同连通域后的输出图像,与输入图像具有相同的尺寸。
- stats:不同连通域的统计信息矩阵,矩阵的数据类型为CV_32S。矩阵中第i行是标签为i的连通域的统计特性,存储的统计信息种类在表6-4中给出。
- centroids:每个连通域的质心坐标,数据类型为CV_64F。
- connectivity:标记连通域时使用的邻域种类,4表示4-邻域,8表示8-邻域,默认参数值为8。
- ltype:输出图像的数据类型,目前只支持CV_32S和CV_16U这两种数据类型,默认参数值为CV_32S。
该函数原型只有六个参数,前两个参数分别表示输入图像和输出图像,第三个参数表示每个连通域的统计信息,第四个参数表示每个连通域的质心位置。后两个参数分别表示统计连通域时选择的邻域种类,分别用4表示4-邻域,8表示8-邻域,参数的默认值为8。最后一个参数表示输出图像的数据类型,可以选择的参数为CV_32S和CV_16U两种,参数的默认值为CV_32S。该函数原型有两个参数具有默认值,在使用时最少只需要四个参数,极大的方便了函数的调用。
简单示例
//
// Created by smallflyfly on 2021/6/16.
//
#include "opencv2/opencv.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace std;
using namespace cv;
int main() {
Mat im = imread("rice.jfif");
Mat gray;
cvtColor(im, gray, CV_BGR2GRAY);
// resize(im, im, Size(0, 0), 0.5, 0.5);
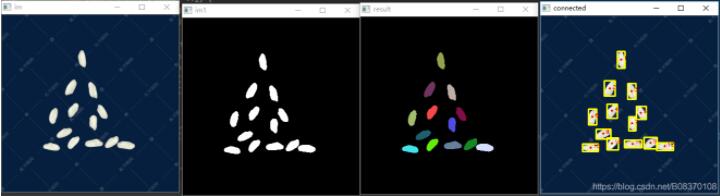
imshow("im", im);
Mat im1;
threshold(gray, im1, 125, 255, THRESH_BINARY);
imshow("im1", im1);
// waitKey(0);
RNG rng(10010);
Mat out;
int num = connectedComponents(im1, out, 8, CV_16U);
vector<Vec3b> colors;
for (int i=0; i<num; i++) {
// 使用均匀分布的随机确定颜色
Vec3b vec = Vec3b(rng.uniform(0, 256), rng.uniform(0, 256), rng.uniform(0, 256));
colors.push_back(vec);
}
Mat result = Mat::zeros(im.size(), im.type());
for (int i = 0; i < im.rows; ++i) {
for (int j = 0; j < im.cols; ++j) {
int label = out.at<uint16_t>(i, j);
if (label == 0) {
continue;
}
result.at<Vec3b>(i, j) = colors[label];
}
}
imshow("result", result);
Mat labels, stats, centroids;
int count = connectedComponentsWithStats(im1, labels, stats, centroids, 8);
cout << count << endl;
for (int i = 1; i < count; ++i) {
int x = centroids.at<double>(i, 0);
int y = centroids.at<double>(i, 1);
cout << x << " " << y << endl;
circle(im, Point(x, y), 2, Scalar(0, 0, 255), -1);
int xmin = stats.at<int>(i, CC_STAT_LEFT);
int ymin = stats.at<int>(i, CC_STAT_TOP);
int w = stats.at<int>(i, CC_STAT_WIDTH);
int h = stats.at<int>(i, CC_STAT_HEIGHT);
Rect rect(xmin, ymin, w, h);
rectangle(im, rect, Scalar(0, 255, 255), 2);
putText(im, to_string(i), Point(x+5, y), FONT_HERSHEY_SCRIPT_SIMPLEX, 1, Scalar(0, 0, 255), 2);
}
imshow("im", im);
waitKey(0);
destroyAllWindows();
return 0;
}
简单双色图效果比较明显 百度图片搜的
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-

Opencv提取连通区域轮廓的方法
本文实例为大家分享了Opencv提取连通区域轮廓的具体代码,供大家参考,具体内容如下 在进行图像分割后,可能需要对感兴趣的目标区域进行提取,比较常用的方法是计算轮廓. 通过轮廓可以获得目标的一些信息: (1)目标位置 (2)目标大小(即面积) (3)目标形状(轮廓矩) 当然,轮廓不一定代表希望目标区域,阈值分割时可能造成一部分信息丢失,因此可以计算轮廓的质心坐标,再进行漫水填充. 程序中有寻找质心+填充,但效果不好,因此就不放填充后的图了. 实验结果: #include "opencv2/img
-
OpenCV实现图像连通域
图像的连通域是指图像中具有相同像素值并且位置相邻的像素组成的区域,连通域分析是指在图像中寻找出彼此互相独立的连通域并将其标记出来. 一般情况下,一个连通域内只包含一个像素值,因此为了防止像素值波动对提取不同连通域的影响,连通域分析常处理的是二值化后的图像. 4-邻域和8-邻域: 常用的图像邻域分析法有两遍扫描法和种子填充法.两遍扫描法会遍历两次图像,第一次遍历图像时会给每一个非0像素赋予一个数字标签,当某个像素的上方和左侧邻域内的像素已经有数字标签时,取两者中的最小值作为当前像素的标签,否则赋予
-
使用OpenCV获取图片连通域数量,并用不同颜色标记函
一,原图和效果图 二,代码 //#########################产生随机颜色######################### cv::Scalar icvprGetRandomColor() { uchar r = 255 * (rand() / (1.0 + RAND_MAX)); uchar g = 255 * (rand() / (1.0 + RAND_MAX)); uchar b = 255 * (rand() / (1.0 + RAND_MAX)); return
-
python opencv实现图像边缘检测
本文利用python opencv进行图像的边缘检测,一般要经过如下几个步骤: 1.去噪 如cv2.GaussianBlur()等函数: 2.计算图像梯度 图像梯度表达的是各个像素点之间,像素值大小的变化幅度大小,变化较大,则可以认为是出于边缘位置,最多可简化为如下形式: 3.非极大值抑制 在获得梯度的方向和大小之后,应该对整幅图像做一个扫描,去除那些非边界上的点.对每一个像素进行检查,看这个点的梯度是不是周围具有相同梯度方向的点中最大的.如下图所示: 4.滞后阈值 现在要确定那些边界才是真正的
-
Python Opencv实现图像轮廓识别功能
本文实例为大家分享了python opencv识别图像轮廓的具体代码,供大家参考,具体内容如下 要求:用矩形或者圆形框住图片中的云朵(不要求全部框出) 轮廓检测 Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓. import cv2 img = cv2.imread('cloud.jpg') # 灰度图像 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 二值化 ret, binary = cv2.th
-
java通过jni调用opencv处理图像的方法
1. 建立java文件 public class getImageFeature { static{ System.loadLibrary("getImageFeatureDll"); } public native int getImageFeatureByName(String filename); public native int getImageFeatureByMemory(); public static void main(String[] args) { getIma
-
Opencv实现图像灰度线性变换
本文实例为大家分享了Opencv实现图像灰度线性变换的具体代码,供大家参考,具体内容如下 通过图像灰度线性变换提高图像对比度和亮度,原图像为src,目标图像为dst,则dst(x,y) = * src(x,y) + . 不仅对单通道图像可以做灰度线性变换,对三通道图像同样可以. #include<opencv2/opencv.hpp>; #include<iostream> using namespace cv; using namespace std; int main(int
-
python opencv对图像进行旋转且不裁剪图片的实现方法
最近在做深度学习时需要用到图像处理相关的操作,在度娘上找到的图片旋转方法千篇一律,旋转完成的图片都不是原始大小,很苦恼,于是google到歪果仁的网站扒拉了一个方法,亲测好用,再次嫌弃天下文章一大抄的现象,虽然我也是抄歪果仁的. 废话不多说了,直接贴代码了. def rotate_bound(image, angle): # grab the dimensions of the image and then determine the # center (h, w) = image.shape[
-
Java OpenCV实现图像镜像翻转效果
本文实例为大家分享了Java OpenCV实现图像镜像翻转效果的具体代码,供大家参考,具体内容如下 主要使用OpenCV的flip()方法,可以实现图像的垂直.水平以及同时垂直镜像翻转. flip是Core的静态方法,用法为: public static void flip(Mat src, Mat dst, int flipCode) 参数说明: src:输入图像: dst:输出图像: flipCode: = 0 图像向下翻转 > 0 图像向右翻转 < 0 图像同时向下向右翻转 代码如下:
-
OpenCV计算图像的水平和垂直积分投影
本文实例为大家分享了OpenCV计算图像的水平和垂直积分投影的具体代码,供大家参考,具体内容如下 #include <cv.h> #include <highgui.h> #pragma comment( lib, "cv.lib" ) #pragma comment( lib, "cxcore.lib" ) #pragma comment( lib, "highgui.lib" ) int main() { IplIma
-
Python+OpenCV实现图像融合的原理及代码
根据导师作业安排,在学习数字图像处理(刚萨雷斯版)第六章 彩色图像处理 中的彩色模型后,导师安排了一个比较有趣的作业: 融合原理为: 1 注意:遥感原RGB图image和灰度图Grayimage为测试用的输入图像: 2 步骤:(1)将RGB转换为HSV空间(H:色调,S:饱和度,V:明度): (2)用Gray图像诶换掉HSV中的V: (3)替换后的HSV转换回RGB空间即可得到结果. 书上只介绍了HSI彩色模型,并没有说到HSV,所以需要网上查找资料. Python代码如下: import cv