OpenCV半小时掌握基本操作之直线检测
目录
- 概述
- 霍夫直线变换
- 原理详解
- 代码实战
- HoughLines
- HoughLinesP
【OpenCV】 ⚠️高手勿入! 半小时学会基本操作 ⚠️ 直线检测
概述
OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 13 课)

霍夫直线变换
霍夫变换 (Hough Line Transform) 是图像处理中的一种特征提取技术. 通过平面空间到极值坐标空间的转换, 可以帮助我们实现直线检测. 如图:
原理详解
当我们把直线 y = kx + b 画在指标坐标系上, 如下图. 我们再从原点引线段到直线上的任一点.
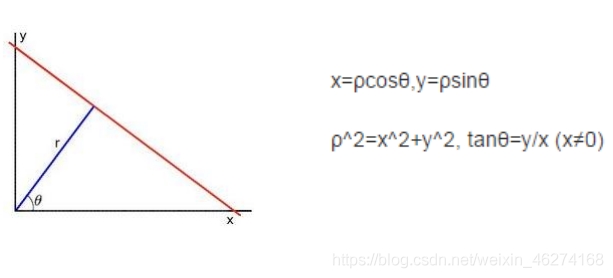
我们可以得到这条线段与 x 轴的夹角为 θ, 距离是 r. 对于直线上的任一点 (x0, y0), 我们可以得到公式:

代码实战
HoughLines
格式:
cv2.HoughLines(image, rho, theta, threshold, lines=None, srn=None, stn=None, min_theta=None, max_theta=None)
参数:
- image: 输入图像
- rho: 线性搜索半径步长, 以像素为单位
- theta: 线性搜索步长, 以弧度为单位
- threshold: 累计阈值
例子:
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 读取图片
image = cv2.imread("sudoku.jpg")
image_copy = image.copy()
# 转换成灰度图
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 边缘检测, Sobel算子大小为3
edges = cv2.Canny(image_gray, 170, 220, apertureSize=3)
# 霍夫曼直线检测
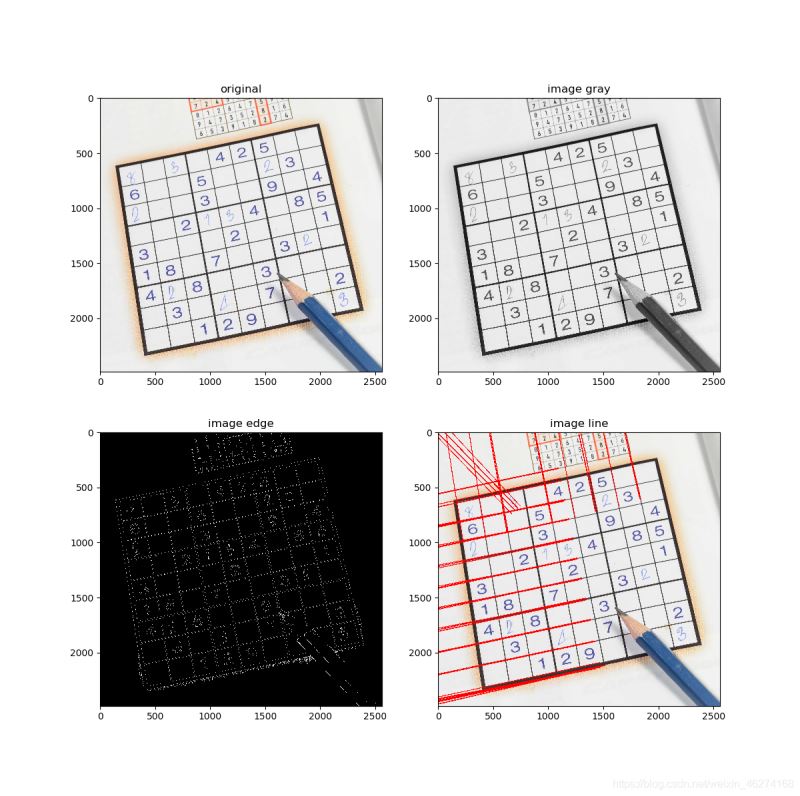
lines = cv2.HoughLines(edges, 1, np.pi / 180, 250)
# 遍历
for line in lines:
# 获取rho和theta
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv2.line(image_copy, (x1, y1), (x2, y2), (0, 0, 255), thickness=5)
# 图片展示
f, ax = plt.subplots(2, 2, figsize=(12, 12))
# 子图
ax[0, 0].imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
ax[0, 1].imshow(image_gray, "gray")
ax[1, 0].imshow(edges, "gray")
ax[1, 1].imshow(cv2.cvtColor(image_copy, cv2.COLOR_BGR2RGB))
# 标题
ax[0, 0].set_title("original")
ax[0, 1].set_title("image gray")
ax[1, 0].set_title("image edge")
ax[1, 1].set_title("image line")
plt.show()
输出结果:
HoughLinesP
此函数在 HoughLines 的基础上末尾加了一个代表概率 (Probabilistic) 的 P, 表明它可以采用累计概率霍夫变换, 来找出二值图像中的直线.
格式:
HoughLinesP(image, rho, theta, threshold, lines=None, minLineLength=None, maxLineGap=None)
参数:
- image: 输入图像
- rho: 线性搜索半径步长, 以像素为单位
- theta: 线性搜索步长, 以弧度为单位
- threshold: 累计阈值
- minLineLength: 最短直线长度
- maxLineGap: 最大孔隙距离
例子:
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 读取图片
image = cv2.imread("sudoku.jpg")
image_copy = image.copy()
# 转换成灰度图
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 边缘检测, Sobel算子大小为3
edges = cv2.Canny(image_gray, 170, 220, apertureSize=3)
# 霍夫曼直线检测
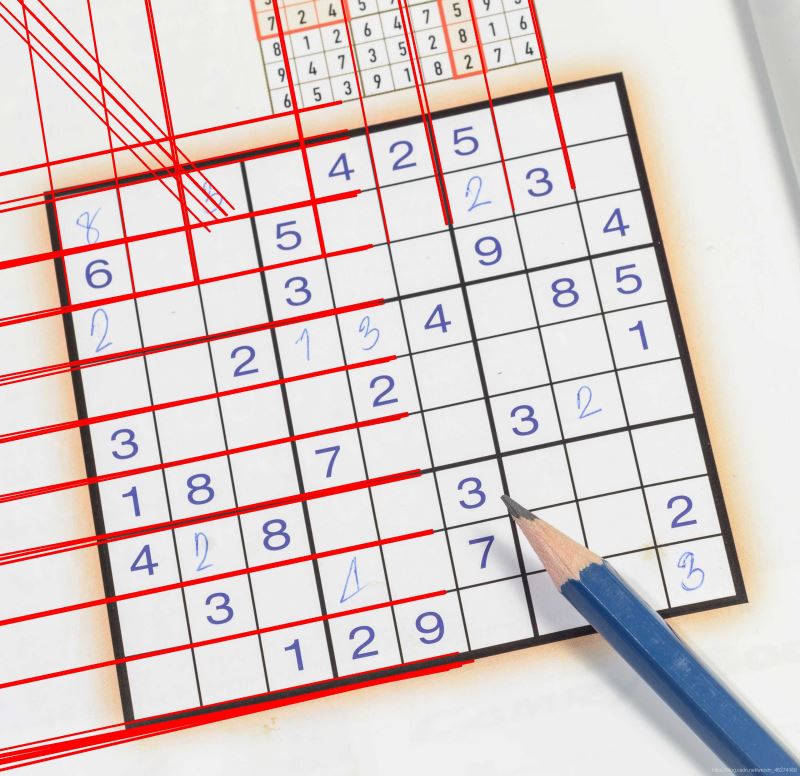
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 100, minLineLength=100, maxLineGap=10)
# 遍历
for line in lines:
# 获取坐标
x1, y1, x2, y2 = line[0]
cv2.line(image_copy, (x1, y1), (x2, y2), (0, 0, 255), thickness=5)
# 图片展示
f, ax = plt.subplots(2, 2, figsize=(12, 12))
# 子图
ax[0, 0].imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
ax[0, 1].imshow(image_gray, "gray")
ax[1, 0].imshow(edges, "gray")
ax[1, 1].imshow(cv2.cvtColor(image_copy, cv2.COLOR_BGR2RGB))
# 标题
ax[0, 0].set_title("original")
ax[0, 1].set_title("image gray")
ax[1, 0].set_title("image edge")
ax[1, 1].set_title("image line")
plt.show()
输出结果:

到此这篇关于OpenCV半小时掌握基本操作之直线检测的文章就介绍到这了,更多相关OpenCV直线检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

OpenCV半小时掌握基本操作之高斯双边
目录 概述 边缘保留滤波 (EPF) 高斯双边 均值迁移 [OpenCV] ⚠️高手勿入! 半小时学会基本操作 ⚠️ 高斯双边 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天带大家用 OpenCV 来实现一个简单的磨皮. 边缘保留滤波 (EPF) 边缘保留滤波 (Edge Preserving Filter) 是图像处理的一种技术. 有别与传统滤波, EPF 会对差别较大的像素区域进行区分, 在保持边缘锐利的同时消除噪声或纹理. 高斯双边 双边滤波 (Bilat
-
OpenCV半小时掌握基本操作之傅里叶变换
目录 概述 高频 vs 低频 傅里叶变换 代码详解 输入转换 傅里叶变换 获取幅度谱 傅里叶逆变换 获取低频 获取高频 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 高频 vs 低频 高频 vs 低频: 高频: 变换剧烈的灰度分量, 例如边界 低频: 变换缓慢的灰度分量, 例如一片大海 滤波: 低通滤波器: 只保留低频, 会使得图像模糊 高通滤波器: 只保留高频, 会使得图像细节增强 傅里叶变换 傅里叶变化 (F
-
利用Opencv中Houghline方法实现直线检测
利用Opencv中的Houghline方法进行直线检测-python语言 这是给Python部落翻译的文章,请在这里看原文. 在图像处理中,霍夫变换用来检测任意能够用数学公式表达的形状,即使这个形状被破坏或者有点扭曲. 下面我们将看到利用HoughLine算法来阐述霍夫变化进行直线检测的原理,把此算法应用到特点图像的边缘检测是可取的.边缘检测方法请参考这篇文章–边缘检测. Houghline算法基础 直线可以表示为y=mx+c,或者以极坐标形式表示为r=xcosθ+ysinθ,其中r是原点到直线
-
python opencv实现直线检测并测出倾斜角度(附源码+注释)
由于学习需要,我想要检测出图片中的直线,并且得到这些直线的角度.于是我在网上搜了好多直线检测的代码,但是没有搜到附有计算直线倾斜角度的代码,所以我花了一点时间,自己写了一份直线检测并测出倾斜角度的代码,希望能够帮助到大家! 注:这份代码只能够检测简单结构图片的直线,复杂结构的图片还需要设置合理的参数 下面展示 源码. import cv2 import numpy as np def line_detect(image): # 将图片转换为HSV hsv = cv2.cvtColor(image
-
Python+OpenCV图像处理——实现直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等).最基本的霍夫变换是从黑白图像中检测直线(线段). 2.Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等) 3.霍夫线变
-
OpenCV半小时掌握基本操作之分水岭算法
[OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 分水岭算法 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 分水岭算法 分水岭算法 (Watershed Algorithm) 是一种图像区域分割算法. 在分割的过程中, 分水岭算法会把跟临近像素间的相似性作为重要的根据. 分水岭分割流程: 读取图片 转换成灰度图 二值化 距离变换 寻找种子 生成 Marker 分水岭变换 距离变换 距离变换 (Distan
-
OpenCV半小时掌握基本操作之直线检测
目录 概述 霍夫直线变换 原理详解 代码实战 HoughLines HoughLinesP [OpenCV] ⚠️高手勿入! 半小时学会基本操作 ⚠️ 直线检测 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 13 课) 霍夫直线变换 霍夫变换 (Hough Line Transform) 是图像处理中的一种特征提取技术. 通过平面空间到极值坐标空间的转换, 可以帮助我们实现直线检测. 如图: 原理详解 当我
-
OpenCV半小时掌握基本操作之圆圈检测
[OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 圆圈检测 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 霍夫圆变换 霍夫圆变换 (Hough Circle Transform) 的原理和霍夫直线变换类似. 对于一条直线, 我们可以用参数 (r, θ) 表示, 对于圆我们需要三个参数 (x, y, r), 分别代表三个参数 x 圆心, y 圆心, r, 半径. 代码实现 因为霍夫圆检测对噪声比较敏感, 所
-
OpenCV半小时掌握基本操作之角点检测
目录 概述 角点检测 角点检测代码 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 角点检测 角点检测 (Corner Detection) 是图像的重要特征. 角点可以帮助我们实现图像对其, 图像拼接, 目标识别等等重要用途. Harris 角点检测 (Harris Corner Detection) 是最基础也是最重要的一种角点检测算法. 通过计算图像在 x, y 上平移的自相似性 (Self-Similari
-
OpenCV半小时掌握基本操作之边缘检测
目录 概述 Scharr 算子 Laplacian 算子 Sobel vs Scharr vs Laplacian Canny 边缘检测 高斯滤波器 梯度和方向 非极大值抑制 双阈值检测 [OpenCV]⚠️高手勿入! 半小时学会基本操作⚠️ 边缘检测 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 12 课) Scharr 算子 Scharr 算子和 Sobel 算子基本一样. 只是卷积核系数不同. Sch
-
OpenCV半小时掌握基本操作之图像轮廓
目录 概述 图像轮廓 绘制轮廓 轮廓特征 轮廓近似 边界矩形 外接圆 [OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 图像轮廓 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 图像轮廓 cv2.findContours可以帮助我们查找轮廓. 格式: cv2.findContours(image, mode, method, contours=None, hierarchy=None, offset=Non
-
OpenCV半小时掌握基本操作之对象测量
目录 概述 对象测量 多边形拟合 计算对象中心 [OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 对象测量 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 对象测量 对象测量可以帮助我们进行矩阵计算: 获取弧长与面积 多边形拟合 计算图片对象中心 原点距: 中心距: 图像重心坐标: 多边形拟合 步骤: 读取图片 转换成灰度图 二值化 轮廓检测 计算轮廓周长 多边形拟合 格式: cv2.approxPolyD
-
OpenCV半小时掌握基本操作之SIFT算法
目录 概述 图像尺度空间 多分辨率金字塔 高斯差分金字塔 计算极值点 SIFT 算法 函数 实战 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 24 课) 图像尺度空间 在一定的范围内, 无论物体是大还是小, 人眼都可以分辨出来. 而计算机要有相同的能力却很难, 所以要让机器能够对物体在不同尺度下有一个统一的认知, 就需要考虑图像在不同的尺度下都存在的特点. 多分辨率金字塔 使用高斯模糊, 不同的 σ 决定
-
OpenCV半小时掌握基本操作之色彩空间
目录 概述 色彩空间 色彩空间转换 视频阈值 [OpenCV]⚠️高手勿入! 半小时学会基本操作⚠️色彩空间 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 6 课) 色彩空间 色彩空间 (Color Space) 即以同的空间维度来表示某一色彩 (通常使用 3 个或者 4 个 值). 常见的色彩空间: RGB HSV HIS YCrCb YUV 色彩空间转换 原图: 代码实现: import numpy a
-
OpenCV半小时掌握基本操作之像素加减乘除&逻辑运算
目录 概述 加减乘除 相加 相减 相乘 相除 逻辑运算 逻辑与 逻辑或 逻辑反 [OpenCV]⚠️高手勿入! 半小时学会基本操作⚠️像素加减乘除 & 逻辑运算 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 加减乘除 原图: 相加 import cv2 def add(image1, image2): """相加""" result = cv2.add(i