OpenCV图像处理之图像拼接详解
目录
- 图像拼接技术
- 一、需求分析
- 二、具体步骤
- 三、代码实现
图像拼接技术
一、需求分析
将下面两张图像进行拼接


拼接得到一张完整的图像

二、具体步骤
1.选择特征点
//1、选择特征点
//左图 右图 识别特征点 是Mat对象 用c d保存
surf->detectAndCompute(left,Mat(),key2,d);
surf->detectAndCompute(right,Mat(),key1,c);
//特征点对比,保存 特征点为中心点区域比对
vector<DMatch> matches;
matcher.match(d,c,matches);
//排序从小到大 找到特征点连线
sort(matches.begin(),matches.end());
2.保存最优的特征点对象
//2、保存最优的特征点对象
vector<DMatch>good_matches;
int ptrpoint = std::min(50,(int)(matches.size()*0.15));
for (int i = 0;i < ptrpoint;i++)
{
good_matches.push_back(matches[i]);
}
//2-1、画线 最优的特征点对象连线
Mat outimg;
drawMatches(left,key2,right,key1,good_matches,outimg,
Scalar::all(-1),Scalar::all(-1),
vector<char>(),DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//imshow("outimg",outimg);

3.特征点匹配
//3、特征点匹配
vector<Point2f>imagepoint1,imagepoint2;
for (int i= 0 ;i < good_matches.size();i++)
{
//查找特征点可连接处 变形
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
//查找特征点可连接处 查找基准线
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
4.透视转换 图像融合
//4、透视转换 图形融合
Mat homo = findHomography(imagepoint1,imagepoint2,CV_RANSAC);
//imshow("homo",homo);
//根据透视转换矩阵进行计算 四个坐标
CalcCorners(homo,right);
//接收透视转换结果
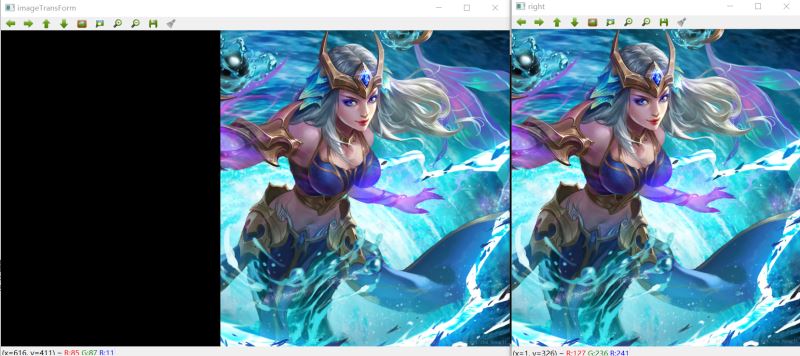
Mat imageTransForm;
//透视转换
warpPerspective(right,imageTransForm,homo,
Size(MAX(corners.right_top.x,corners.right_bottom.x),left.rows));
//右图透视变换 由于本次图片材料是自己截图拼接的 因此看不出透视变换的明显特征
//imshow("imageTransForm",imageTransForm);
//结果进行整合
int dst_width = imageTransForm.cols;
int dst_height = left.rows;
Mat dst(dst_height,dst_width,CV_8UC3);
dst.setTo(0);
imageTransForm.copyTo(dst(Rect(0,0,imageTransForm.cols,imageTransForm.rows)));
left.copyTo(dst(Rect(0,0,left.cols,left.rows)));
右图的透视转换,由于图像材料是自己截图拼接的,因此看不出透视变换的明显特征,但根据上图可知已经做出透视变换图像处理操作
左图与右图的透视转换结果 拼接 【这里只是将窗口移动测试看下前面步骤是否正确】
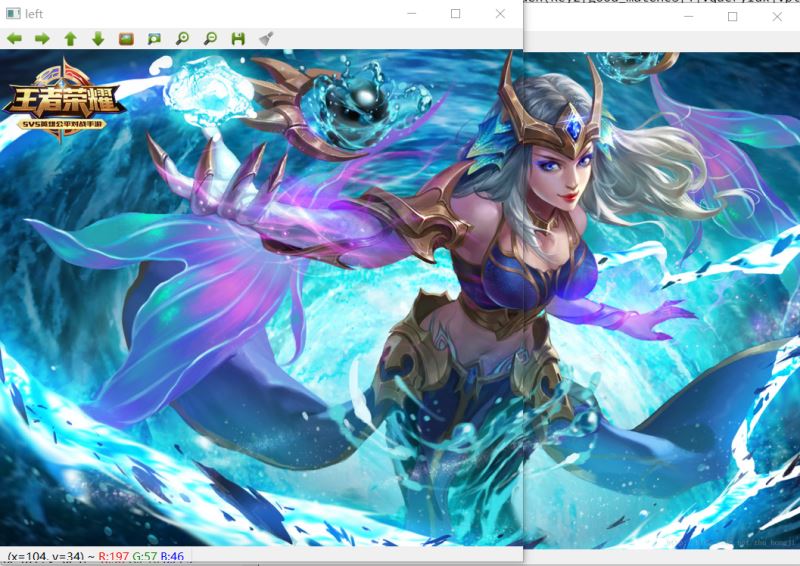
可以看出左图与右图的透视转换结果 是可以进行接下来的图像融合操作的
5.优化图像 进行最终的结果展示
//5、优化图像
OptimizeSeam(left,imageTransForm,dst);
//最终图像拼接结果
imshow("dst",dst);

可以看出 顺利完成 两张图像拼接的图像处理操作

三、代码实现
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>//图像融合
#include <opencv2/xfeatures2d.hpp>//拼接算法
#include <opencv2/calib3d.hpp>
#include <opencv2/imgproc.hpp>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}
//图像融合的去裂缝处理操作
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst)
{
int start = MIN(corners.left_top.x, corners.left_bottom.x);//开始位置,即重叠区域的左边界
double processWidth = img1.cols - start;//重叠区域的宽度
int rows = dst.rows;
int cols = img1.cols; //注意,是列数*通道数
double alpha = 1;//img1中像素的权重
for (int i = 0; i < rows; i++)
{
uchar* p = img1.ptr<uchar>(i); //获取第i行的首地址
uchar* t = trans.ptr<uchar>(i);
uchar* d = dst.ptr<uchar>(i);
for (int j = start; j < cols; j++)
{
//如果遇到图像trans中无像素的黑点,则完全拷贝img1中的数据
if (t[j * 3] == 0 && t[j * 3 + 1] == 0 && t[j * 3 + 2] == 0)
{
alpha = 1;
}
else
{
//img1中像素的权重,与当前处理点距重叠区域左边界的距离成正比,实验证明,这种方法确实好
alpha = (processWidth - (j - start)) / processWidth;
}
d[j * 3] = p[j * 3] * alpha + t[j * 3] * (1 - alpha);
d[j * 3 + 1] = p[j * 3 + 1] * alpha + t[j * 3 + 1] * (1 - alpha);
d[j * 3 + 2] = p[j * 3 + 2] * alpha + t[j * 3 + 2] * (1 - alpha);
}
}
}
int main()
{
//左图
Mat left = imread("D:/00000000000003jieduanshipincailliao/a1.png");
//右图
Mat right = imread("D:/00000000000003jieduanshipincailliao/a2.png");
//左右图显示
imshow("left",left);
imshow("right",right);
//创建SURF对象
Ptr<SURF> surf;
//create 函数参数 海森矩阵阀值 800特征点以内
surf = SURF::create(800);
//创建一个暴力匹配器 用于特征点匹配
BFMatcher matcher;
//特征点容器 存放特征点KeyPoint
vector<KeyPoint>key1,key2;
//保存特征点
Mat c,d;
//1、选择特征点
//左图 右图 识别特征点 是Mat对象 用c d保存
surf->detectAndCompute(left,Mat(),key2,d);
surf->detectAndCompute(right,Mat(),key1,c);
//特征点对比,保存 特征点为中心点区域比对
vector<DMatch> matches;
matcher.match(d,c,matches);
//排序从小到大 找到特征点连线
sort(matches.begin(),matches.end());
//2、保存最优的特征点对象
vector<DMatch>good_matches;
int ptrpoint = std::min(50,(int)(matches.size()*0.15));
for (int i = 0;i < ptrpoint;i++)
{
good_matches.push_back(matches[i]);
}
//2-1、画线 最优的特征点对象连线
Mat outimg;
drawMatches(left,key2,right,key1,good_matches,outimg,
Scalar::all(-1),Scalar::all(-1),
vector<char>(),DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//imshow("outimg",outimg);
//3、特征点匹配
vector<Point2f>imagepoint1,imagepoint2;
for (int i= 0 ;i < good_matches.size();i++)
{
//查找特征点可连接处 变形
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
//查找特征点可连接处 查找基准线
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
//4、透视转换 图形融合
Mat homo = findHomography(imagepoint1,imagepoint2,CV_RANSAC);
//imshow("homo",homo);
//根据透视转换矩阵进行计算 四个坐标
CalcCorners(homo,right);
//接收透视转换结果
Mat imageTransForm;
//透视转换
warpPerspective(right,imageTransForm,homo,
Size(MAX(corners.right_top.x,corners.right_bottom.x),left.rows));
//右图透视变换 由于本次图片材料是自己截图拼接的 因此看不出透视变换的明显特征
//imshow("imageTransForm",imageTransForm);
//结果进行整合
int dst_width = imageTransForm.cols;
int dst_height = left.rows;
Mat dst(dst_height,dst_width,CV_8UC3);
dst.setTo(0);
imageTransForm.copyTo(dst(Rect(0,0,imageTransForm.cols,imageTransForm.rows)));
left.copyTo(dst(Rect(0,0,left.cols,left.rows)));
//5、优化图像
OptimizeSeam(left,imageTransForm,dst);
//最终图像拼接结果
imshow("dst",dst);
waitKey(0);
return 0;
}
到此这篇关于OpenCV图像处理之图像拼接详解的文章就介绍到这了,更多相关OpenCV图像拼接内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

opencv实现多张图像拼接
本文实例为大家分享了opencv实现多张图像简单拼接,供大家参考,具体内容如下 #include <iostream> #include <core/core.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/highgui/highgui.hpp> #include<opencv2/stitching.hpp> using namespace std; using nam
-
OpenCV实战之图像拼接的示例代码
目录 背景 实现步骤 一.读取文件 二.单应性矩阵计算 三.图像拼接 总结 背景 图像拼接可以应用到手机中的全景拍摄,也就是将多张图片根据关联信息拼成一张图片: 实现步骤 1.读文件并缩放图片大小: 2.根据特征点和计算描述子,得到单应性矩阵: 3.根据单应性矩阵对图像进行变换,然后平移: 4.图像拼接并输出拼接后结果图: 一.读取文件 第一步实现读取两张图片并缩放到相同尺寸: 代码如下: img1 = cv2.imread('map1.png') img2 = cv2.imread('map2
-
详解C++ OpenCV实现图像拼接的原理及方法
目录 前言 一.图像拼接相关原理 图像特征采集 特征提取算法 透视变换 透视矩阵 图像拷贝 二.案例实现 Step1:导入目标图片 Step2:特征点提取和匹配 Step3:图像配准 Step4:图像拷贝 Step5:图像融合 完整代码 三.总结 前言 本文以实现图像拼接为目标,把分割开的图像进行拼接还原,核心的内容包括:OpenCV图像拼接相关原理以及OpenCV图像拼接案例的实现 一.图像拼接相关原理 图像特征采集 一幅图中总存在着一些独特的像素点,这些点我们可以认为就是这幅图的特征,即为特
-
OpenCV全景图像拼接的实现示例
本文主要介绍了OpenCV全景图像拼接的实现示例,分享给大家,具体如下: left_01.jpg right_01.jpg Stitcher.py import numpy as np import cv2 class Stitcher: #拼接函数 def stitch(self, images, ratio=0.75, reprojThresh=4.0,showMatches=False): #获取输入图片 (imageB, imageA) = images #检测A.B图片的SIFT关键特
-
OpenCV图像处理之图像拼接详解
目录 图像拼接技术 一.需求分析 二.具体步骤 三.代码实现 图像拼接技术 一.需求分析 将下面两张图像进行拼接 拼接得到一张完整的图像 二.具体步骤 1.选择特征点 //1.选择特征点 //左图 右图 识别特征点 是Mat对象 用c d保存 surf->detectAndCompute(left,Mat(),key2,d); surf->detectAndCompute(right,Mat(),key1,c); //特征点对比,保存 特征点为中心点区域比对 vector<DMatch&
-
python opencv图像处理基本操作示例详解
目录 1.图像基本操作 ①读取图像 ②显示图像 ③视频读取 ④图像截取 ⑤颜色通道提取及还原 ⑥边界填充 ⑦数值计算 ⑧图像融合 2.阈值与平滑处理 ①设定阈值并对图像处理 ②图像平滑-均值滤波 ③图像平滑-方框滤波 ④图像平滑-高斯滤波 ⑤图像平滑-中值滤波 3.图像的形态学处理 ①腐蚀操作 ②膨胀操作 ③开运算和闭运算 4.图像梯度处理 ①梯度运算 ②礼帽与黑帽 ③图像的梯度处理 5.边缘检测 ①Canny边缘检测 1.图像基本操作 ①读取图像 ②显示图像 该函数中,name是显示窗口的名字
-
OpenCV图像处理GUI功能详解
目录 一.图像入门 1.读取图像 2.显示图像 3.保存图像 二.视频入门 1.用相机捕捉视频 2.播放视频文件 3.保存视频 总结 OpenCV图像处理 一.图像入门 1.读取图像 使用 cv.imread() 函数读取一张图像,图片应该在工作目录中,或者应该提供完整的图像路径.第二个参数是一个 flag,指定了应该读取图像的方式 cv.IMREAD_COLOR:加载彩色图像,任何图像的透明度都会被忽略,它是默认标志cv.IMREAD_GRAYSCALE:以灰度模式加载图像cv.IMREAD_
-
Python Opencv图像处理基本操作代码详解
1.图像读取 使用cv2.imread(filepath,flags)读入图像 filepath: 读入图像完整路径(绝对路径,相对路径) flags: 读入图像标志 cv2.IMREAD_COLOR:默认参数,读入一副彩色图,忽略alpha通道:可以通过1指定 cv2.IMREAD_GRAYSCALE:读入灰度图片 也通过0指定 cv2.IMREAD_UNCHANGED:读入完整图片,包括alpha通道 import cv2 img1 = cv2.imread('C:/star.png',1)
-
python OpenCV 实现高斯滤波详解
目录 一.高斯滤波 二.C++代码 三.python代码 四.结果展示 1.原始图像 2.5x5卷积 3.9x9卷积 一.高斯滤波 高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程. [1] 通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到.高斯滤波的具体操作是:用一个模板(或称卷积.掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值. 二.C++代码
-
Python OpenCV机器学习之图像识别详解
目录 背景 一.人脸识别 二.车牌识别 三.DNN图像分类 背景 OpenCV中也提供了一些机器学习的方法,例如DNN:本篇将简单介绍一下机器学习的一些应用,对比传统和前沿的算法,能从其中看出优劣: 一.人脸识别 主要有以下两种实现方法: 1.哈尔(Haar)级联法:专门解决人脸识别而推出的传统算法: 实现步骤: 创建Haar级联器: 导入图片并将其灰度化: 调用函数接口进行人脸识别: 函数原型: detectMultiScale(img,scaleFactor,minNeighbors) sc
-
opencv canny边缘检测算法详解
目录 一.边缘检测原理 二.canny算法原理 三.opencv函数支持Canny() 四.代码示例: 一.边缘检测原理 图像的边缘由图像中两个相邻的区域之间的像素集合组成,是指图像中一个区域的结束和另外一个区域的开始.也可以这么理解,图像边缘就是图像中灰度值发生空间突变的像素的集合.梯度方向和幅度是图像边缘的两个性质,沿着跟边缘垂直的的方向,像素值的变化幅度比较平缓:而沿着与边缘平行的方向,则像素值变化幅度变化比较大.于是,根据该变化特性,通常会采用计算一阶或者二阶导数的方法来描述和检测图像边
-
Python数字图像处理基础直方图详解
目录 直方图的定义 直方图的性质 直方图的应用 图像增强 图像分割 图像识别 Python直方图的计算 直方图的定义 直方图的性质 只统计某个灰度级出现的次数,图像的大小不一样的话, 某灰度值的像素出现的次数是不一样的. 那如果我们在这基础上除以像素总个数的话,那就是某一灰度级出现的概率,那么这样的话不同大小的同一内容图像其灰度直方图是一样的. 直方图的应用 图像增强 图像分割 图像识别 Python直方图的计算 import cv2 import numpy as np import matp
-
Python OpenCV绘制各类几何图形详解
目录 一.绘制直线 二.绘制矩形 三.绘制圆形 四.绘制椭圆 五.绘制多边形 六.绘制文字 七.总结 一.绘制直线 在OpenCV中,绘制直线需要获取直线的起点和终点坐标,调用cv2.line()函数实现该功能.该函数原型如下所示: img = line(img, pt1, pt2, color[, thickness[, lineType[, shift]]]) – img表示需要绘制的那幅图像 – pt1表示线段第一个点的坐标 – pt2表示线段第二个点的坐标 – color表示线条颜色,需
-
Qt+OpenCV实现目标检测详解
目录 一.创建项目&UI设计 二.代码与演示 演示效果 拓展阅读 一.创建项目&UI设计 创建项目,UI设计如下 文件类型判断 简单的判断文件类型 QString file("sample.jpg"); if (file.contains(".jpg") || file.contains(".bmp") || file.contains(".png")) qDebug()<<"这是图片.&