OpenCV实现车辆识别和运动目标检测
目录
- 一:车辆识别成果展示
- 二:车辆识别超详细步骤解析
- 步骤一:灰度化处理
- 步骤二:帧差处理
- 步骤三:二值化处理
- 步骤四:图像降噪
- 步骤五:提取关键点 框选运动目标检测
- 三:车辆识别完整代码
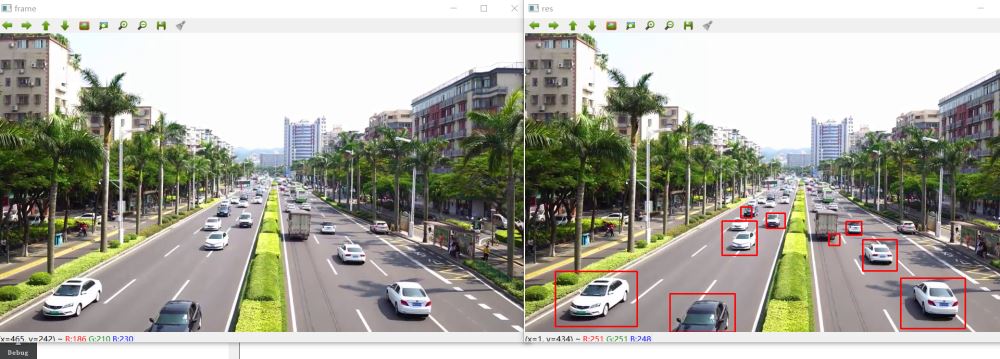
一:车辆识别成果展示
二:车辆识别超详细步骤解析
步骤一:灰度化处理
灰度处理目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
效果展示:【避免内存浪费 帧差法对前后帧图像灰度化处理】

//1 灰度处理 目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
cvtColor(frontFrame,frontGray,CV_RGB2GRAY);//前一帧灰度化处理
cvtColor(afterFrame,afterGray,CV_RGB2GRAY);//后一帧灰度化处理
//imshow("frontGray",frontGray);//测试
//imshow("afterGray",afterGray);//测试
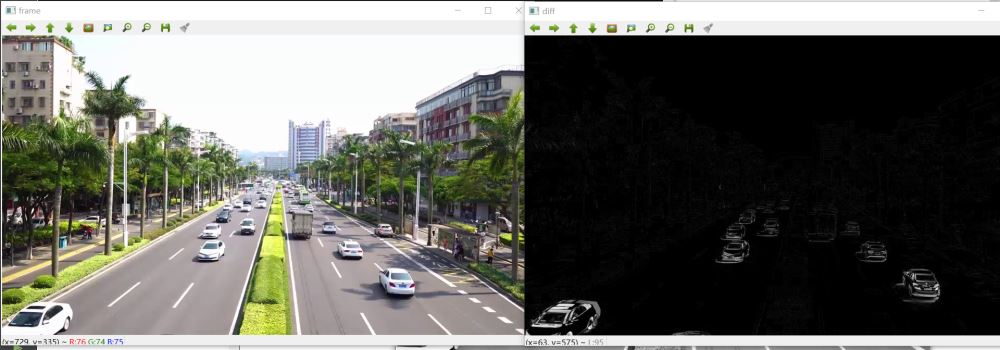
步骤二:帧差处理
帧差处理目的 找到帧与帧之间的差异(正在运动的物体)
效果展示:【运动目标的检测:运动事物显示灰度,静止事物显示黑度】
//2 帧差处理 目的 找到帧与帧之间的差异(正在运动的物体)
Mat diff;
Mat frontGray,afterGray;
absdiff(frontGray,afterGray,diff);//前后帧对比存于diff中
imshow("diff",diff);//测试
步骤三:二值化处理
二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
效果展示:【步骤二中运动事物显示灰度,静止事物显示黑度,在这里进行二值化处理,能够黑白分明,便于计算机识别运动目标,如下右图二值化处理后黑白分明】【缺点:存在白色噪点,如下右图除了车辆外后面的背景也显示白度,这就是白色噪点,需要去除】

//3 二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
threshold(diff,diff,25,255,CV_THRESH_BINARY);
imshow("threshold",diff);//测试
步骤四:图像降噪
4-1 腐蚀处理 目的 去除白色噪点
效果展示:【步骤三中存在的白色噪点能够去除,但是在去除白色噪点的同时,也影响了车辆的白度显示,如下右图可以看出,车辆白度显示有所降低,因此还是需要改进】

//4 图像降噪
//4-1 腐蚀处理 目的 去除白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(3,3));//小于3*3方块的白色噪点都会被腐蚀
erode(diff,diff,element);
imshow("erode",diff);//测试
4-2 膨胀处理 目的 把白色区域变大
效果展示:【如下右图,将车辆形状大致显示,便于框选车辆识别操作】

//4-2 膨胀 目的 把白色区域变大
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(20,20));
dilate(diff,diff,element2);
imshow("dilate",diff);//测试
步骤五:提取关键点 框选运动目标检测
效果展示:车辆识别成功

//5 提取关键点
//5-1 查找特征点
vector<vector<Point>>contours;
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//5-2 提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
//5-3 确定下四个点来用于框选目标物体
int x,y,w,h;
int num=contours.size();
for(int i = 0;i < num;i++)
{
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
//多边拟合
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制矩形
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,0,255),2);
}
三:车辆识别完整代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat moveCheck(Mat &frontFrame,Mat &afterFrame)
{
Mat resFrame,diff;
Mat frontGray,afterGray;
//克隆当前帧画面 返回最终结果
resFrame = afterFrame.clone();
//1 灰度处理 目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
cvtColor(frontFrame,frontGray,CV_RGB2GRAY);
cvtColor(afterFrame,afterGray,CV_RGB2GRAY);
//imshow("frontGray",frontGray);
//imshow("afterGray",afterGray);
//2 帧差处理 目的 找到帧与帧之间的差异(正在运动的物体)
absdiff(frontGray,afterGray,diff);
//imshow("diff",diff);
//3 二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
threshold(diff,diff,25,255,CV_THRESH_BINARY);
//imshow("threshold",diff);
//4 图像降噪
//4-1 腐蚀处理 目的 去除白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(3,3));//小于3*3方块的白色噪点都会被腐蚀
erode(diff,diff,element);
//imshow("erode",diff);
//4-2 膨胀 目的 把白色区域变大
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(20,20));
dilate(diff,diff,element2);
//imshow("dilate",diff);
//5 提取关键点
//5-1 查找特征点
vector<vector<Point>>contours;
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//5-2 提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
//5-3 确定下四个点来用于框选目标物体
int x,y,w,h;
int num=contours.size();
for(int i = 0;i < num;i++)
{
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
//多边拟合
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制矩形
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,0,255),2);
}
return resFrame;
}
int main(int argc, char *argv[])
{
Mat frame;
Mat temp;
Mat res;
int count = 0;
VideoCapture cap("D:/00000000000003jieduanshipincailliao/carMove.mp4");//视频路径
while (cap.read(frame))
{
count++;
if(count == 1)
{
res = moveCheck(frame,frame);
}
else
{
res = moveCheck(temp,frame);
}
imshow("frame",frame);
imshow("res",res);//最终车辆识别成果
temp = frame.clone();
waitKey(15);
}
return 0;
}
当然,夜晚的车辆也能够正常识别
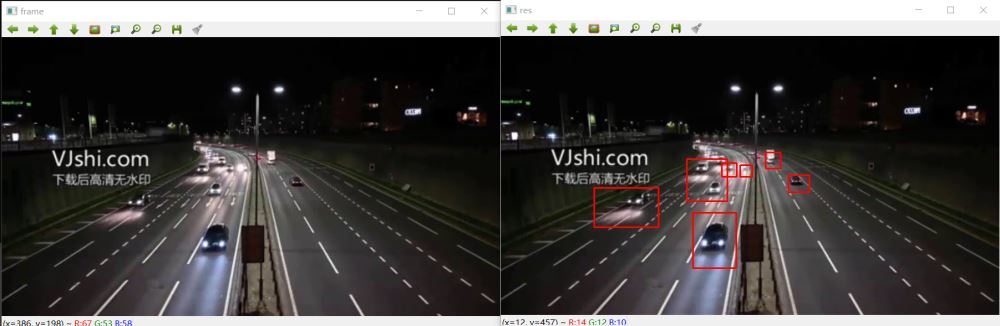
不过,本次的帧差法的车辆识别存在弊端,只要是运动的物体都会识别,比如,博主打开摄像头,动一动手指头,也会被框选识别,因此是有一定弊端的

不过,这种帧差法的运动目标检测,在夜晚监控中是非常广泛地应用到,因为有任何的风吹草动,都会被框选识别。
到此这篇关于OpenCV实现车辆识别和运动目标检测的文章就介绍到这了,更多相关OpenCV车辆识别和运动目标检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
Opencv二帧差法检测运动目标与提取轮廓
Opencv学习之二帧差法运动目标检测与轮廓提取 ,供大家参考,具体内容如下 代码是从网上摘抄学习的,加了好多注释,感觉就像边看书边做笔记一样,给人以满足的享受.Let's do this! #include "highgui.h" #include "cv.h" #include "stdio.h" #include <time.h> #include <math.h> #include <string.h>
-

Python+OpenCV目标跟踪实现基本的运动检测
目标跟踪是对摄像头视频中的移动目标进行定位的过程,有着非常广泛的应用.实时目标跟踪是许多计算机视觉应用的重要任务,如监控.基于感知的用户界面.增强现实.基于对象的视频压缩以及辅助驾驶等. 有很多实现视频目标跟踪的方法,当跟踪所有移动目标时,帧之间的差异会变的有用:当跟踪视频中移动的手时,基于皮肤颜色的均值漂移方法是最好的解决方案:当知道跟踪对象的一方面时,模板匹配是不错的技术. 本文代码是做一个基本的运动检测 考虑的是"背景帧"与其它帧之间的差异 这种方法检测结果还是挺不错的,但是需要
-
使用OpenCV实现检测和追踪车辆
本文实例为大家分享了OpenCV实现检测和追踪车辆的具体代码,供大家参考,具体内容如下 完整源码GitHub 使用高斯混合模型(BackgroundSubtractorMOG2)对背景建模,提取出前景 使用中值滤波去掉椒盐噪声,再闭运算和开运算填充空洞 使用cvBlob库追踪车辆,我稍微修改了cvBlob源码来通过编译 由于要对背景建模,这个方法要求背景是静止的 另外不同车辆白色区域不能连通,否则会认为是同一物体 void processVideo(char* videoFilename) {
-
OpenCV实现帧差法检测运动目标
今天的目标是用OpenCV实现对运动目标的检测,这里选用三帧帧差法.代码如下: #include <opencv2/opencv.hpp> #include <cv.h> #include <highgui.h> #include <stdio.h> #include <ctype.h> double Threshold_index=0; const int CONTOUR_MAX_AERA = 200; void trackbar(int po
-
使用OpenCV实现道路车辆计数的使用方法
今天,我们将一起探讨如何基于计算机视觉实现道路交通计数. 在本教程中,我们将仅使用Python和OpenCV,并借助背景减除算法非常简单地进行运动检测. 我们将从以下四个方面进行介绍: 1. 用于物体检测的背景减法算法主要思想. 2. OpenCV图像过滤器. 3. 利用轮廓检测物体. 4. 建立进一步数据处理的结构. 背景扣除算法 有许多不同的背景扣除算法,但是它们的主要思想都很简单. 假设有一个房间的视频,在某些帧上没有人和宠物,那么此时的视频基本为静态的,我们将其称为背景(backgrou
-
基于OpenCv的运动物体检测算法
基于一个实现的基于OpenCv的运动物体检测算法,可以用于检测行人或者其他运动物体. #include <stdio.h> #include <cv.h> #include <cxcore.h> #include <highgui.h> int main( int argc, char** argv ) //声明IplImage指针 IplImage* pFrame = NULL; IplImage* pFrImg = NULL; IplImage* pBk
-
python opencv实现运动检测
本文实例为大家分享了python opencv运动检测的具体代码,供大家参考,具体内容如下 # -*- coding:utf-8 -*- __author__ = 'kingking' __version__ = '1.0' __date__ = '14/07/2017' import cv2 import numpy as np import time camera = cv2.VideoCapture(0) # 参数0表示第一个摄像头 # 判断视频是否打开 if (camera.isOpen
-
Python+OpenCV编写车辆计数器系统
目录 介绍 对象追踪 流行的追踪算法 对象跟踪的应用 实现欧几里得距离跟踪器 加载库和视频 在OpenCV中获取视频帧 结论 介绍 本文,我们将使用欧几里德距离跟踪和轮廓的概念在 Python 中使用 OpenCV 构建车辆计数器系统. 对象追踪 对象跟踪是在视频中定位移动对象的过程.在 OpenCV 中有多种技术可以执行对象跟踪.可以针对 2 种情况执行对象跟踪: 跟踪单个对象 跟踪多个对象 在这里,我们将执行多对象跟踪方法,因为我们在一个时间范围内有多辆车. 流行的追踪算法 DEEP SOR
-
OpenCV实现车辆识别和运动目标检测
目录 一:车辆识别成果展示 二:车辆识别超详细步骤解析 步骤一:灰度化处理 步骤二:帧差处理 步骤三:二值化处理 步骤四:图像降噪 步骤五:提取关键点 框选运动目标检测 三:车辆识别完整代码 一:车辆识别成果展示 二:车辆识别超详细步骤解析 步骤一:灰度化处理 灰度处理目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小 效果展示:[避免内存浪费 帧差法对前后帧图像灰度化处理] //1 灰度处理 目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小 cvtColor(frontFrame
-
Qt+OpenCV利用帧差法实现车辆识别
目录 一.目标 二.使用Qt界面 三.代码实现 一.目标 Qt界面实现 点击 线程启动按钮播放视频 左边界面显示原视频 右边界面显示车辆识别视频 结果展示如下: 初始界面 点击线程启动后,即可车辆识别 二.使用Qt界面 设计好界面后最好先保存 对按钮设置槽函数 三.代码实现 难点在于:线程同步问题 需要使用到connect函数中的第五个参数[第五个参数 具体说明如下] 1 AutoConnection 为默认参数,由发送信号决定,如果发送信号和接受信号是同一个线程,则调用DirectConnec
-
Python OpenCV利用笔记本摄像头实现人脸检测
本文实例为大家分享了Python OpenCV利用笔记本摄像头实现人脸检测的具体代码,供大家参考,具体内容如下 1.安装opencv 首先参考其他文章安装pip. 之后以管理员身份运行命令提示符,输入以下代码安装opencv pip install --user opencv-python 可以使用以下代码测试安装是否成功 #导入opencv模块 import cv2 #捕捉帧,笔记本摄像头设置为0即可 capture = cv2.VideoCapture(0) #循环显示帧 while(Tru
-
python利用Opencv实现人脸识别功能
本文实例为大家分享了python利用Opencv实现人脸识别功能的具体代码,供大家参考,具体内容如下 首先:需要在在自己本地安装opencv具体步骤可以问度娘 如果从事于开发中的话建议用第三方的人脸识别(推荐阿里) 1.视频流中进行人脸识别 # -*- coding: utf-8 -*- import cv2 import sys from PIL import Image def CatchUsbVideo(window_name, camera_idx): cv2.namedWindow(w
-
基于python的opencv图像处理实现对斑马线的检测示例
基本思路 斑马线检测通过opencv图像处理来进行灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀后对图像进行轮廓检测,通过判断车辆和行人的位置,以及他们之间的距离信息,当车速到超过一定阈值时并且与行人距离较近时,则会被判定车辆为未礼让行人. 结果示例 实验流程 先通过视频截取一张图片来进行测试,如果结果满意之后再嵌套到视频中,从而达到想要的效果. 1.预处理(灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀)> 根据自己的需求来修改一些值 #灰度值转换 imgGray = cv2.cvtColor
-
python基于opencv实现人脸识别
将opencv中haarcascade_frontalface_default.xml文件下载到本地,我们调用它辅助进行人脸识别. 识别图像中的人脸 #coding:utf-8 import cv2 as cv # 读取原始图像 img = cv.imread('face.png') # 调用熟悉的人脸分类器 识别特征类型 # 人脸 - haarcascade_frontalface_default.xml # 人眼 - haarcascade_eye.xml # 微笑 - haarcascad
-
python基于OpenCV模板匹配识别图片中的数字
前言 本博客主要实现利用OpenCV的模板匹配识别图像中的数字,然后把识别出来的数字输出到txt文件中,如果识别失败则输出"读取失败". 操作环境: OpenCV - 4.1.0 Python 3.8.1 程序目标 单个数字模板:(这些单个模板是我自己直接从图片上截取下来的) 要处理的图片: 终端输出: 文本输出: 思路讲解 代码讲解 首先定义两个会用到的函数 第一个是显示图片的函数,这样的话在显示图片的时候就比较方便了 def cv_show(name, img): cv2.imsh
-
Python+Opencv实现数字识别的示例代码
一.什么是数字识别? 所谓的数字识别,就是使用算法自动识别出图片中的数字.具体的效果如下图所示: 上图展示了算法的处理效果,算法能够自动的识别到LCD屏幕上面的数字,这在现实场景中具有很大的实际应用价值.下面我们将对它的实现细节进行详细解析. 二.如何实现数字识别? 对于数字识别这个任务而言,它并不是一个新的研究方向,很久之前就有很多的学者们在关注这个问题,并提出了一些可行的解决方案,本小节我们将对这些方案进行简单的总结. 方案一:使用现成的OCR技术. OCR,即文字识别,它是一个比较
-
springboot集成opencv实现人脸识别功能的详细步骤
前言 项目中检测人脸图片是否合法的功能,之前用的是百度的人脸识别接口,由于成本高昂不得不寻求替代方案. 什么是opencv? OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux.Windows.Android和Mac OS操作系统上.轻量级而且高效--由一系列 C 函数和少量 C++ 类构成,同时提供了Python.Java.MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法. 项目集成步骤 由于项目是放在Linux系统中跑的
-
Android基于OpenCV实现QR二维码检测
目录 QR二维码 QR二维码格式 QR二维码结构 API QRCodeDetector类结构 检测QR二维码 识别QR二维码 检测并识别QR二维码 操作 结果 源码 QR二维码 QR码(英语:Quick Response Code:全称为快速响应矩阵图码)是二维码的一种,于1994年由日本DENSO WAVE公司发明.QR来自英文Quick Response的缩写,即快速反应,因为发明者希望QR码可以快速解码其内容.QR码使用四种标准化编码模式(数字.字母数字.字节(二进制)和日文(Shift_