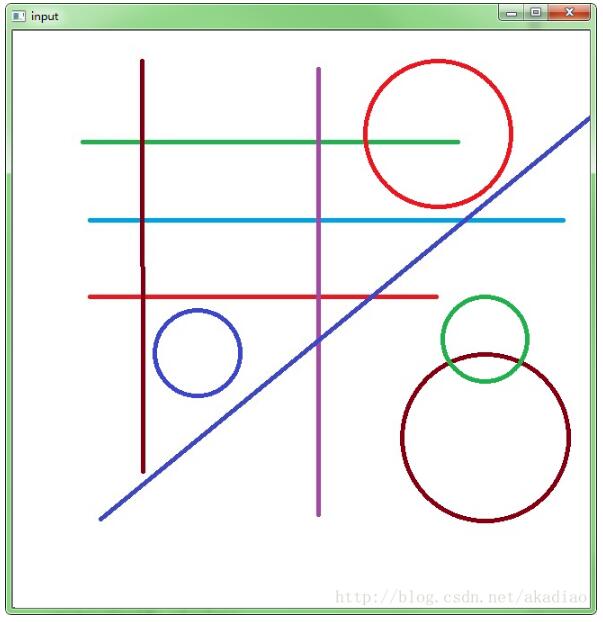
opencv3/C++实现霍夫圆/直线检测
霍夫直线检测
参数说明:
cv::HoughLinesP( InputArray src, // 输入图像(8位灰度图像) OutputArray lines, // 输出直线两点坐标(vector<Vec4i>) double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长(一般取CV_PI/180) int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线 double minLineLength=0;// 直线最小长度 double maxLineGap=0;// 直线最大间隔 )
示例:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src, dst;
src = imread("E:/image/image/line.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
cvNamedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), src.type());
cvtColor(src,dst,CV_RGB2GRAY);
Canny(dst,dst,0,200);
vector<Vec4i> plines;
HoughLinesP(dst, plines, 1, CV_PI/180, 150, 10, 10);
for(size_t i =0; i< plines.size(); i++)
{
Vec4i points = plines[i];
line(src, Point(points[0], points[1]), Point(points[2],points[3]), Scalar(0,255,255), 3, CV_AA);
}
cvNamedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output", src);
waitKey();
return 0;
}


霍夫圆检测
霍夫圆检测对噪声比较敏感,一般要先对图像做中值滤波。
参数说明:
HoughCircles( InputArray image, // 输入图像 ,必须是8位的单通道灰度图像 OutputArray circles, // 输出结果,即圆信息(圆心+半径) Int method, // 采用方法:HOUGH_GRADIENT Double dp, // dp = 1; Double mindist, // 10 最短距离-可以分辨是两个圆的,否则认为是同心圆:src_gray.rows/8 Double param1, // 用于Canny的边缘阀值上限,下限被置为上限的一半 Double param2, // 中心点累加器阈值 Int minradius, // 最小半径 Int maxradius//最大半径 )
示例:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src, dst;
src = imread("E:/image/image/line.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
cvNamedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
cvtColor(src,src,CV_RGB2GRAY);
dst = src.clone();
cvtColor(dst,dst,CV_GRAY2RGB);
//中值滤波
medianBlur(src,src,3);
vector<Vec3f> circles;
HoughCircles(src,circles,CV_HOUGH_GRADIENT,1,100,45,30,45,220);
for(size_t i = 0; i < circles.size(); i++)
{
Vec3f c = circles[i];
circle(dst, Point(c[0], c[1]), c[2], Scalar(0,255,255), 3, CV_AA);
}
cvNamedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output", dst);
waitKey();
return 0;
}

以上这篇opencv3/C++实现霍夫圆/直线检测就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-

利用Opencv中Houghline方法实现直线检测
利用Opencv中的Houghline方法进行直线检测-python语言 这是给Python部落翻译的文章,请在这里看原文. 在图像处理中,霍夫变换用来检测任意能够用数学公式表达的形状,即使这个形状被破坏或者有点扭曲. 下面我们将看到利用HoughLine算法来阐述霍夫变化进行直线检测的原理,把此算法应用到特点图像的边缘检测是可取的.边缘检测方法请参考这篇文章–边缘检测. Houghline算法基础 直线可以表示为y=mx+c,或者以极坐标形式表示为r=xcosθ+ysinθ,其中r是原点到直线
-
opencv3/C++实现霍夫圆/直线检测
霍夫直线检测 参数说明: cv::HoughLinesP( InputArray src, // 输入图像(8位灰度图像) OutputArray lines, // 输出直线两点坐标(vector<Vec4i>) double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长(一般取CV_PI/180) int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线 double minLineLength=0;//
-
C++ opencv霍夫圆检测使用案例详解
本程序是一个最简单的霍夫圆检测函数的使用案例,刚刚学会的用法,发一下,可以参考,参数啥的可根据图片调节. #pragma once #include<quickopencv.h> #include<vector> #include <stdio.h> #include <iostream> #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgpr
-
Opencv检测多个圆形(霍夫圆检测,轮廓面积筛选)
主要是利用霍夫圆检测.面积筛选等完成多个圆形检测,具体代码及结果如下. 第一部分是头文件(common.h): #pragma once #include<opencv2/opencv.hpp> #include<opencv2/highgui.hpp> #include<iostream> using namespace std; using namespace cv; extern Mat src; void imageBasicInformation(Mat&am
-
Python实现霍夫圆和椭圆变换代码详解
在极坐标中,圆的表示方式为: x=x0+rcosθ y=y0+rsinθ 圆心为(x0,y0),r为半径,θ为旋转度数,值范围为0-359 如果给定圆心点和半径,则其它点是否在圆上,我们就能检测出来了.在图像中,我们将每个非0像素点作为圆心点,以一定的半径进行检测,如果有一个点在圆上,我们就对这个圆心累加一次.如果检测到一个圆,那么这个圆心点就累加到最大,成为峰值.因此,在检测结果中,一个峰值点,就对应一个圆心点. 霍夫圆检测的函数: skimage.transform.hough_circle
-
OpenCV半小时掌握基本操作之直线检测
目录 概述 霍夫直线变换 原理详解 代码实战 HoughLines HoughLinesP [OpenCV] ⚠️高手勿入! 半小时学会基本操作 ⚠️ 直线检测 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. (第 13 课) 霍夫直线变换 霍夫变换 (Hough Line Transform) 是图像处理中的一种特征提取技术. 通过平面空间到极值坐标空间的转换, 可以帮助我们实现直线检测. 如图: 原理详解 当我
-
OpenCV霍夫圆变换cv2.HoughCircles()
目录 1. 效果图 2. 源码 参考 这篇博客将学习如何使用霍夫圆变换在图像中找到圆圈,OpenCV使用cv2.HoughCircles()实现霍夫圆变换. circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20, param1=50, param2=40, minRadius=25, maxRadius=0) img: 待检测的灰度图cv2.HOUGH_GRADIENT:检测的方法,霍夫梯度1:检测的圆与原始图像具有相同的大小,dp=
-
Android基于OpenCV实现霍夫直线检测
目录 霍夫直线检测 点和线的对偶性 极坐标参数方程 API 操作 效果 霍夫直线检测 点和线的对偶性 图像空间中的点,对应霍夫空间中的直线 图像空间中的直线,对应霍夫空间中的点 共点的直线,在霍夫空间中对应的点在一条直线上 共线的点,在霍夫空间中对应的直线交于一点 极坐标参数方程 对于平面中的一条直线,在笛卡尔坐标中,常见的有点斜式,两点式两种表示方法.然而在霍夫变换中,考虑的是另外一种表示方式:使用(r, theta)来表示一条直线.其中r为该直线到原点的距离,theta为该直线的垂线与x轴的
-
Java+opencv3.2.0实现hough直线检测
hough变换是图像处理中的一种特征提取技术,该过程在一个参数空间中通过计算累计结果的局部最大值得到一个符合特定形状的集合作为hough变换结果. 发展史: 1962年由PaulHough首次提出,用来检测直线和曲线. 1972年由Richard Duda & Peter Hart推广使用,扩展到任意形状物体的识别. 原理: 一条直线在直角坐标系下的表示形式为y=k*x+b,而在极坐标系下表示为r=x*cos(theta)+y*sin(theta).hough变换的思想为在直角坐标系下的一个点对
-
Java+opencv3.2.0实现hough圆检测功能
hough圆检测和hough线检测的原理近似,对于圆来说,在参数坐标系中表示为C:(x,y,r). 函数: Imgproc.HoughCircles(Mat image, Mat circles, int method, double dp, double minDist, double param1, double param2, int minRadius, int maxRadius) 参数说明: image:源图像 circles:检测到的圆的输出矢量(x,y,r) method:使用的
-
Python OpenCV基于霍夫圈变换算法检测图像中的圆形
目录 第一章:霍夫变换检测圆 ① 实例演示1 ② 实例演示2 ③ 霍夫变换函数解析 第二章:Python + opencv 完整检测代码 ① 源代码 ② 运行效果图 第一章:霍夫变换检测圆 ① 实例演示1 这个是设定半径范围 0-50 后的效果. ② 实例演示2 这个是设定半径范围 50-70 后的效果,因为原图稍微大一点,半径也大了一些. ③ 霍夫变换函数解析 cv.HoughCircles() 方法 参数分别为:image.method.dp.minDist.param1.param2.mi