python目标检测yolo1 yolo2 yolo3和SSD网络结构对比
目录
睿智的目标检测5——yolo1、yolo2、yolo3和SSD的网络结构汇总对比 学习前言各个网络的结构图与其实现代码1、yolo12、yolo23、yolo34、SSD 总结
学习前言
……最近在学习yolo1、yolo2和yolo3,事实上它们和SSD网络有一定的相似性,我准备汇总一下,看看有什么差别。
各个网络的结构图与其实现代码 1、yolo1
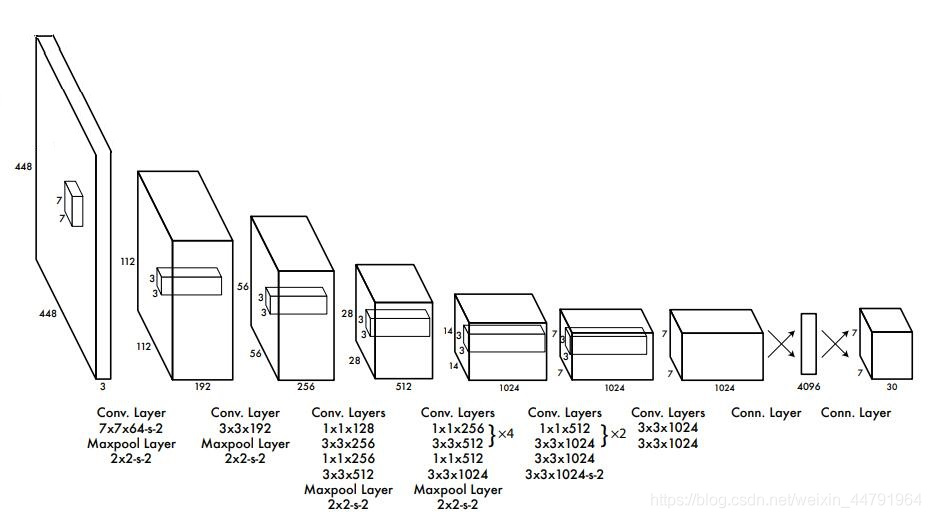
由图可见,其进行了二十多次卷积还有四次最大池化,其中3x3卷积用于提取特征,1x1卷积用于压缩特征,最后将图像压缩到7x7xfilter的大小,相当于将整个图像划分为7x7的网格,每个网格负责自己这一块区域的目标检测。
整个网络最后利用全连接层使其结果的size为(7x7x30),其中7x7代表的是7x7的网格,30前20个代表的是预测的种类,后10代表两个预测框及其置信度(5x2)。
网络部分代码如下:
# relu的改进版def leak_relu(self,x, alpha=0.1): return tf.maximum(alpha * x, x)# 建立网络部分def _build_net(self): x = tf.placeholder(tf.float32, [None, 448, 448, 3]) with tf.variable_scope('yolo'): # _conv_layer(self, x, num_filters, filter_size, stride,scope) with tf.variable_scope('conv_2'): # (448,448,3)->(224,224,64) net = self._conv_layer(x, 64, 7, 2,'conv_2') # (224,224,64)->(112,112,64) net = self._maxpool_layer(net, 2, 2) with tf.variable_scope('conv_4'): # (112,112,64)->(112,112,192) net = self._conv_layer(net, 192, 3, 1,'conv_4') # (112,112,192)->(56,56,192) net = self._maxpool_layer(net, 2, 2) with tf.variable_scope('conv_6'): # (56,56,128) net = self._conv_layer(net, 128, 1, 1,'conv_6') with tf.variable_scope('conv_7'): # (56,56,256) net = self._conv_layer(net, 256, 3, 1,'conv_7') with tf.variable_scope('conv_8'): # (56,56,256) net = self._conv_layer(net, 256, 1, 1,'conv_8') with tf.variable_scope('conv_9'): # (56,56,512) net = self._conv_layer(net, 512, 3, 1,'conv_9') # (28,28,512) net = self._maxpool_layer(net, 2, 2) with tf.variable_scope('conv_11'): net = self._conv_layer(net, 256, 1, 1,'conv_11') with tf.variable_scope('conv_12'): net = self._conv_layer(net, 512, 3, 1,'conv_12') with tf.variable_scope('conv_13'): net = self._conv_layer(net, 256, 1, 1,'conv_13') with tf.variable_scope('conv_14'): net = self._conv_layer(net, 512, 3, 1,'conv_14') with tf.variable_scope('conv_15'): net = self._conv_layer(net, 256, 1, 1,'conv_15') with tf.variable_scope('conv_16'): net = self._conv_layer(net, 512, 3, 1,'conv_16') with tf.variable_scope('conv_17'): net = self._conv_layer(net, 256, 1, 1,'conv_17') with tf.variable_scope('conv_18'): net = self._conv_layer(net, 512, 3, 1,'conv_18') with tf.variable_scope('conv_19'): net = self._conv_layer(net, 512, 1, 1,'conv_19') with tf.variable_scope('conv_20'): net = self._conv_layer(net, 1024, 3, 1,'conv_20') # (14,14,512) net = self._maxpool_layer(net, 2, 2) with tf.variable_scope('conv_22'): net = self._conv_layer(net, 512, 1, 1,'conv_22') with tf.variable_scope('conv_23'): net = self._conv_layer(net, 1024, 3, 1,'conv_23') with tf.variable_scope('conv_24'): net = self._conv_layer(net, 512, 1, 1,'conv_24') with tf.variable_scope('conv_25'): net = self._conv_layer(net, 1024, 3, 1,'conv_25') with tf.variable_scope('conv_26'): net = self._conv_layer(net, 1024, 3, 1,'conv_26') with tf.variable_scope('conv_28'): # (7,7,1024) net = self._conv_layer(net, 1024, 3, 2,'conv_28') with tf.variable_scope('conv_29'): net = self._conv_layer(net, 1024, 3, 1,'conv_29') with tf.variable_scope('conv_30'): net = self._conv_layer(net, 1024, 3, 1,'conv_30') net = self._flatten(net) # (7x7x512,512) with tf.variable_scope('fc_33'): net = self._fc_layer(net, 512, activation=self.leak_relu,scope='fc_33') with tf.variable_scope('fc_34'): net = self._fc_layer(net, 4096, activation=self.leak_relu,scope='fc_34') with tf.variable_scope('fc_36'): net = self._fc_layer(net, 7*7*30,scope='fc_36') # 其返回了placeholder_x和(7,7,30)net return net,x# 生成卷积层def _conv_layer(self, x, num_filters, filter_size, stride,scope): # 生成卷积层的weights in_channels = x.get_shape().as_list()[-1] weight = tf.Variable(tf.truncated_normal([filter_size, filter_size, in_channels, num_filters], stddev=0.1),name='weights') # 生成卷积层的bias bias = tf.Variable(tf.zeros([num_filters,]),name='biases') # 计算要padding的量, pad_size = filter_size // 2 pad_mat = np.array([[0, 0], [pad_size, pad_size], [pad_size, pad_size], [0, 0]]) x_pad = tf.pad(x, pad_mat) # 卷积 conv = tf.nn.conv2d(x_pad, weight, strides=[1, stride, stride, 1], padding="VALID",name=scope) # 经过优化后的relu output = self.leak_relu(tf.nn.bias_add(conv, bias)) return outputdef _fc_layer(self, x, num_out, activation=None,scope=None): # 全连接层 num_in = x.get_shape().as_list()[-1] weight = tf.Variable(tf.truncated_normal([num_in, num_out], stddev=0.1),name='weights') bias = tf.Variable(tf.zeros([num_out,]),name='biases') output = tf.nn.xw_plus_b(x, weight, bias,name=scope) if activation: output = activation(output) return outputdef _maxpool_layer(self, x, pool_size, stride): # 最大池化 output = tf.nn.max_pool(x, [1, pool_size, pool_size, 1], strides=[1, stride, stride, 1], padding="SAME") return outputdef _flatten(self, x): """flatten the x""" tran_x = tf.transpose(x, [0, 3, 1, 2]) # channle first mode nums = np.product(x.get_shape().as_list()[1:]) return tf.reshape(tran_x, [-1, nums])预测结果如下: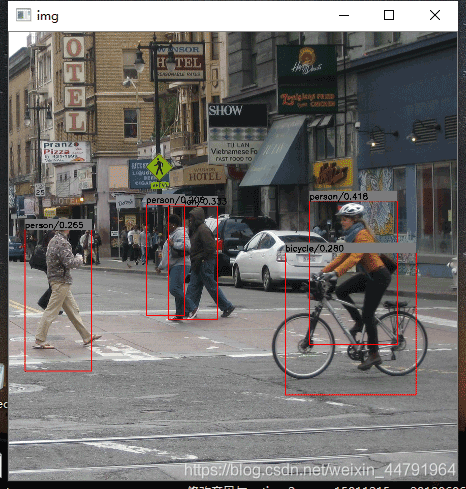
可见预测结果较差。
2、yolo2
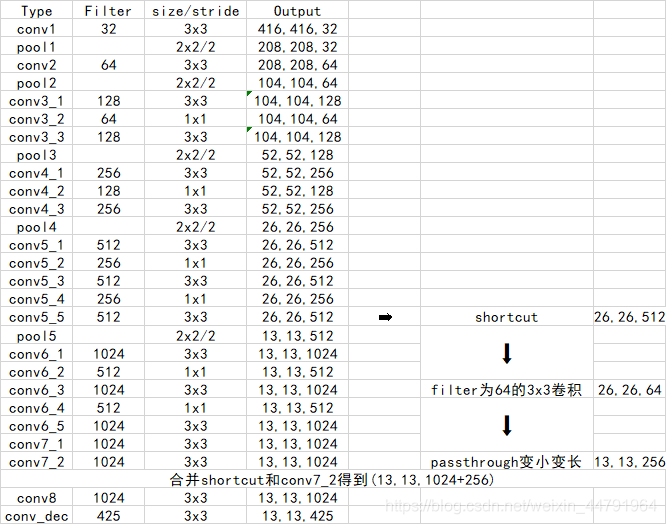
YOLOv2使用了一个新的分类网络作为特征提取部分,网络使用了较多的3 x 3卷积核,在每一次池化操作后把通道数翻倍。借鉴了network in network的思想,把1 x 1的卷积核置于3 x 3的卷积核之间,用来压缩特征。使用batch normalization稳定模型训练,加速收敛,正则化模型。
与此同时,其保留了一个shortcut用于存储之前的特征。
除去网络结构的优化外,yolo2相比于yolo1加入了先验框部分,我们可以看到最后输出的conv_dec的shape为(13,13,425),其中13x13是把整个图分为13x13的网格用于预测,425可以分解为(85x5),在85中,由于yolo2常用的是coco数据集,其中具有80个类,剩余的5指的是x、y、w、h和其置信度。x5的5中,意味着预测结果包含5个框,分别对应5个先验框。
解码部分代码如下:
def decode(self,net): self.anchor_size = tf.constant(self.anchor_size,tf.float32) # net的shape为[batch,169,5,85] net = tf.reshape(net, [-1, 13 * 13, self.num_anchors, self.num_class + 5]) # 85 里面 0、1为xy的偏移量,2、3是wh的偏移量,4是置信度,5->84是每个种类的概率 # 偏移量、置信度、类别 # 中心坐标相对于该cell坐上角的偏移量,sigmoid函数归一化到(0,1) # [batch,169,5,2] xy_offset = tf.nn.sigmoid(net[:, :, :, 0:2]) wh_offset = tf.exp(net[:, :, :, 2:4]) obj_probs = tf.nn.sigmoid(net[:, :, :, 4]) class_probs = tf.nn.softmax(net[:, :, :, 5:]) # 在feature map对应坐标生成anchors,13,13 height_index = tf.range(self.feature_map_size[0], dtype=tf.float32) width_index = tf.range(self.feature_map_size[1], dtype=tf.float32) x_cell, y_cell = tf.meshgrid(height_index, width_index) x_cell = tf.reshape(x_cell, [1, -1, 1]) # 和上面[H*W,num_anchors,num_class+5]对应 y_cell = tf.reshape(y_cell, [1, -1, 1]) # x_cell和y_cell是网格分割中心 # xy_offset是相对中心的偏移情况 bbox_x = (x_cell + xy_offset[:, :, :, 0]) / 13 bbox_y = (y_cell + xy_offset[:, :, :, 1]) / 13 bbox_w = (self.anchor_size[:, 0] * wh_offset[:, :, :, 0]) / 13 bbox_h = (self.anchor_size[:, 1] * wh_offset[:, :, :, 1]) / 13 bboxes = tf.stack([bbox_x - bbox_w / 2, bbox_y - bbox_h / 2, bbox_x + bbox_w / 2, bbox_y + bbox_h / 2], axis=3) return bboxes, obj_probs, class_probs网络部分代码如下:
def conv2d(self,x,filters_num,filters_size,pad_size=0,stride=1,batch_normalize=True,activation=leaky_relu,use_bias=False,name='conv2d'): # 是否进行pad if pad_size > 0: x = tf.pad(x,[[0,0],[pad_size,pad_size],[pad_size,pad_size],[0,0]]) # pad后进行卷积 out = tf.layers.conv2d(x,filters=filters_num,kernel_size=filters_size,strides=stride,padding='VALID',activation=None,use_bias=use_bias,name=name) # BN应该在卷积层conv和激活函数activation之间, # (后面有BN层的conv就不用偏置bias,并激活函数activation在后) # 如果需要标准化则进行标准化 if batch_normalize: out = tf.layers.batch_normalization(out,axis=-1,momentum=0.9,training=False,name=name+'_bn') if activation: out = activation(out) return out def maxpool(self,x, size=2, stride=2, name='maxpool'): return tf.layers.max_pooling2d(x, pool_size=size, strides=stride,name=name) def passthrough(self,x, stride): # 变小变长 return tf.space_to_depth(x, block_size=stride) def darknet(self): x = tf.placeholder(dtype=tf.float32,shape=[None,416,416,3]) # 416,416,3 -> 416,416,32 net = self.conv2d(x, filters_num=32, filters_size=3, pad_size=1, name='conv1') # 416,416,32 -> 208,208,32 net = self.maxpool(net, size=2, stride=2, name='pool1') # 208,208,32 -> 208,208,64 net = self.conv2d(net, 64, 3, 1, name='conv2') # 208,208,64 -> 104,104,64 net = self.maxpool(net, 2, 2, name='pool2') # 104,104,64 -> 104,104,128 net = self.conv2d(net, 128, 3, 1, name='conv3_1') net = self.conv2d(net, 64, 1, 0, name='conv3_2') net = self.conv2d(net, 128, 3, 1, name='conv3_3') # 104,104,128 -> 52,52,128 net = self.maxpool(net, 2, 2, name='pool3') net = self.conv2d(net, 256, 3, 1, name='conv4_1') net = self.conv2d(net, 128, 1, 0, name='conv4_2') net = self.conv2d(net, 256, 3, 1, name='conv4_3') # 52,52,128 -> 26,26,256 net = self.maxpool(net, 2, 2, name='pool4') # 26,26,256-> 26,26,512 net = self.conv2d(net, 512, 3, 1, name='conv5_1') net = self.conv2d(net, 256, 1, 0, name='conv5_2') net = self.conv2d(net, 512, 3, 1, name='conv5_3') net = self.conv2d(net, 256, 1, 0, name='conv5_4') net = self.conv2d(net, 512, 3, 1, name='conv5_5') # 这一层特征图,要进行后面passthrough,保留一层特征层 shortcut = net # 26,26,512-> 13,13,512 net = self.maxpool(net, 2, 2, name='pool5') # # 13,13,512-> 13,13,1024 net = self.conv2d(net, 1024, 3, 1, name='conv6_1') net = self.conv2d(net, 512, 1, 0, name='conv6_2') net = self.conv2d(net, 1024, 3, 1, name='conv6_3') net = self.conv2d(net, 512, 1, 0, name='conv6_4') net = self.conv2d(net, 1024, 3, 1, name='conv6_5') ''' 训练检测网络时去掉了分类网络的网络最后一个卷积层, 在后面增加了三个卷积核尺寸为3 * 3,卷积核数量为1024的卷积层, 并在这三个卷积层的最后一层后面跟一个卷积核尺寸为1 * 1的卷积层, 卷积核数量是(B * (5 + C))。 对于VOC数据集,卷积层输入图像尺寸为416 * 416时最终输出是13 * 13个栅格, 每个栅格预测5种boxes大小,每个box包含5个坐标值和20个条件类别概率, 所以输出维度是13 * 13 * 5 * (5 + 20)= 13 * 13 * 125。 检测网络加入了passthrough layer, 从最后一个输出为26 * 26 * 512的卷积层连接到新加入的三个卷积核尺寸为3 * 3的卷积层的第二层,使模型有了细粒度特征。 ''' # 下面这部分主要是training for detection net = self.conv2d(net, 1024, 3, 1, name='conv7_1') # 13,13,1024-> 13,13,1024 net = self.conv2d(net, 1024, 3, 1, name='conv7_2') # shortcut增加了一个中间卷积层,先采用64个1*1卷积核进行卷积,然后再进行passthrough处理 # 这样26*26*512 -> 26*26*64 -> 13*13*256的特征图 shortcut = self.conv2d(shortcut, 64, 1, 0, name='conv_shortcut') shortcut = self.passthrough(shortcut, 2) # 连接之后,变成13*13*(1024+256) net = tf.concat([shortcut, net],axis=-1) # channel整合到一起,concatenated with the original features,passthrough层与ResNet网络的shortcut类似,以前面更高分辨率的特征图为输入,然后将其连接到后面的低分辨率特征图上, net = self.conv2d(net, 1024, 3, 1, name='conv8') # detection layer: 最后用一个1*1卷积去调整channel,该层没有BN层和激活函数,变成: S*S*(B*(5+C)),在这里为:13*13*425 output = self.conv2d(net, filters_num=self.f_num, filters_size=1, batch_normalize=False, activation=None, use_bias=True, name='conv_dec') return output,x预测结果如下: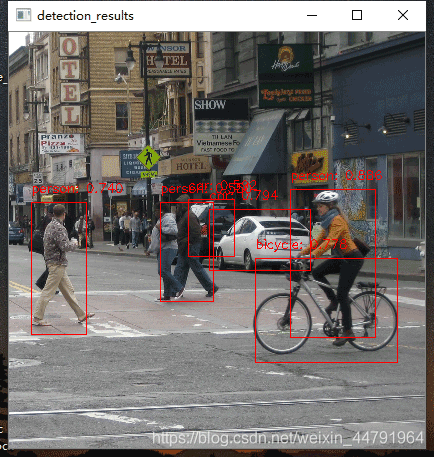
相比于yolo1有很大提升。
3、yolo3
YOLOv3相比于之前的yolo1和yolo2,改进较大,主要改进方向有:
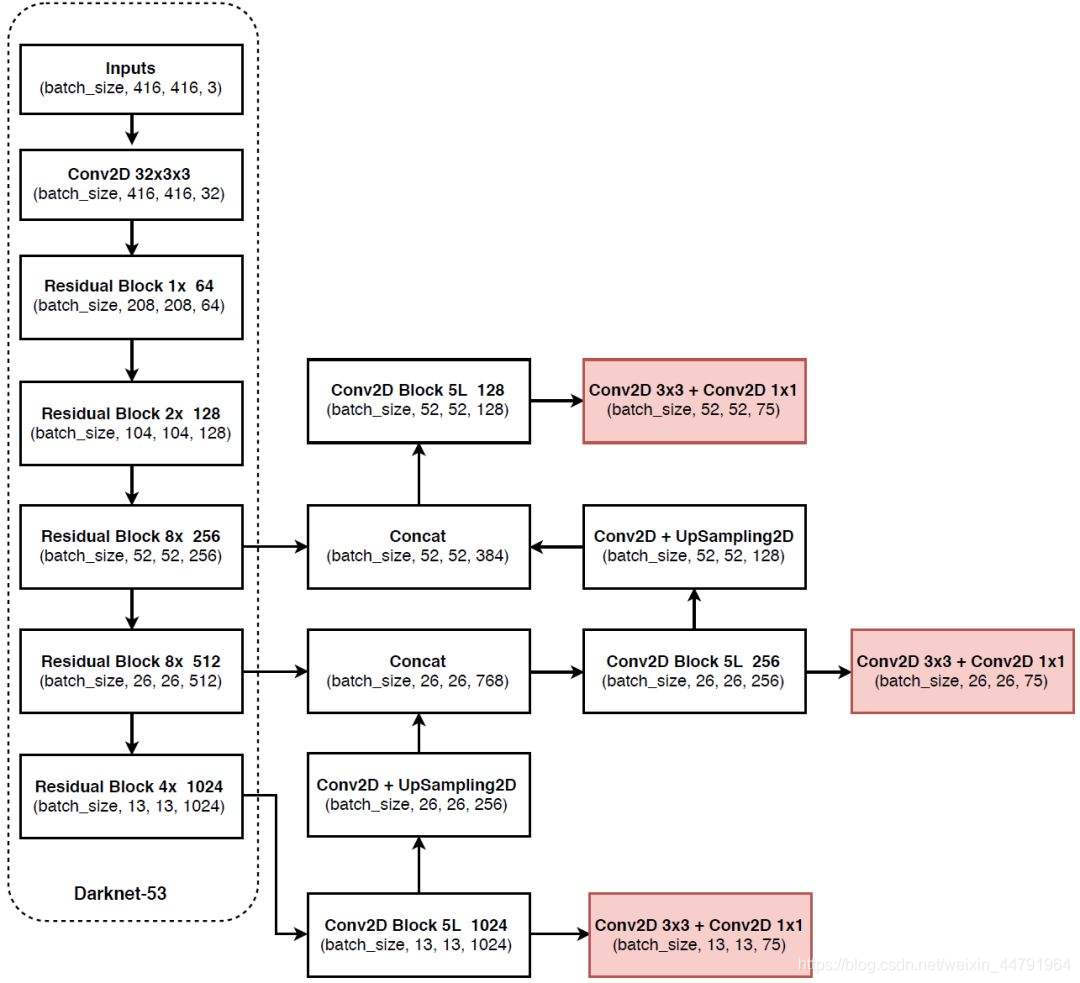
1、使用了残差网络Residual,残差卷积就是进行一次3X3的卷积,然后保存该卷积layer,再进行一次1X1的卷积和一次3X3的卷积,并把这个结果加上layer作为最后的结果, 残差网络的特点是容易优化,并且能够通过增加相当的深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度神经网络中增加深度带来的梯度消失问题。
2、提取多特征层进行目标检测,一共提取三个特征层,它的shape分别为(13,13,75),(26,26,75),(52,52,75)最后一个维度为75是因为该图是基于voc数据集的,它的类为20种,yolo3只有针对每一个特征层存在3个先验框,所以最后维度为3x25。
3、其采用反卷积UmSampling2d设计,逆卷积相对于卷积在神经网络结构的正向和反向传播中做相反的运算,其可以更多更好的提取出特征。
# l2 正则化def _batch_normalization_layer(self, input_layer, name = None, training = True, norm_decay = 0.99, norm_epsilon = 1e-3): ''' Introduction ------------ 对卷积层提取的feature map使用batch normalization Parameters ---------- input_layer: 输入的四维tensor name: batchnorm层的名字 trainging: 是否为训练过程 norm_decay: 在预测时计算moving average时的衰减率 norm_epsilon: 方差加上极小的数,防止除以0的情况 Returns ------- bn_layer: batch normalization处理之后的feature map ''' bn_layer = tf.layers.batch_normalization(inputs = input_layer, momentum = norm_decay, epsilon = norm_epsilon, center = True, scale = True, training = training, name = name) return tf.nn.leaky_relu(bn_layer, alpha = 0.1)# 这个就是用来进行卷积的def _conv2d_layer(self, inputs, filters_num, kernel_size, name, use_bias = False, strides = 1): """ Introduction ------------ 使用tf.layers.conv2d减少权重和偏置矩阵初始化过程,以及卷积后加上偏置项的操作 经过卷积之后需要进行batch norm,最后使用leaky ReLU激活函数 根据卷积时的步长,如果卷积的步长为2,则对图像进行降采样 比如,输入图片的大小为416*416,卷积核大小为3,若stride为2时,(416 - 3 + 2)/ 2 + 1, 计算结果为208,相当于做了池化层处理 因此需要对stride大于1的时候,先进行一个padding操作, 采用四周都padding一维代替'same'方式 Parameters ---------- inputs: 输入变量 filters_num: 卷积核数量 strides: 卷积步长 name: 卷积层名字 trainging: 是否为训练过程 use_bias: 是否使用偏置项 kernel_size: 卷积核大小 Returns ------- conv: 卷积之后的feature map """ conv = tf.layers.conv2d( inputs = inputs, filters = filters_num, kernel_size = kernel_size, strides = [strides, strides], kernel_initializer = tf.glorot_uniform_initializer(), padding = ('SAME' if strides == 1 else 'VALID'), kernel_regularizer = tf.contrib.layers.l2_regularizer(scale = 5e-4), use_bias = use_bias, name = name) return conv# 这个用来进行残差卷积的# 残差卷积就是进行一次3X3的卷积,然后保存该卷积layer# 再进行一次1X1的卷积和一次3X3的卷积,并把这个结果加上layer作为最后的结果def _Residual_block(self, inputs, filters_num, blocks_num, conv_index, training = True, norm_decay = 0.99, norm_epsilon = 1e-3): """ Introduction ------------ Darknet的残差block,类似resnet的两层卷积结构,分别采用1x1和3x3的卷积核,使用1x1是为了减少channel的维度 Parameters ---------- inputs: 输入变量 filters_num: 卷积核数量 trainging: 是否为训练过程 blocks_num: block的数量 conv_index: 为了方便加载预训练权重,统一命名序号 weights_dict: 加载预训练模型的权重 norm_decay: 在预测时计算moving average时的衰减率 norm_epsilon: 方差加上极小的数,防止除以0的情况 Returns ------- inputs: 经过残差网络处理后的结果 """ # 在输入feature map的长宽维度进行padding inputs = tf.pad(inputs, paddings=[[0, 0], [1, 0], [1, 0], [0, 0]], mode='CONSTANT') layer = self._conv2d_layer(inputs, filters_num, kernel_size = 3, strides = 2, name = "conv2d_" + str(conv_index)) layer = self._batch_normalization_layer(layer, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 for _ in range(blocks_num): shortcut = layer layer = self._conv2d_layer(layer, filters_num // 2, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) layer = self._batch_normalization_layer(layer, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 layer = self._conv2d_layer(layer, filters_num, kernel_size = 3, strides = 1, name = "conv2d_" + str(conv_index)) layer = self._batch_normalization_layer(layer, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 layer += shortcut return layer, conv_index#---------------------------------------## 生成_darknet53和逆卷积层#---------------------------------------#def _darknet53(self, inputs, conv_index, training = True, norm_decay = 0.99, norm_epsilon = 1e-3): """ Introduction ------------ 构建yolo3使用的darknet53网络结构 Parameters ---------- inputs: 模型输入变量 conv_index: 卷积层数序号,方便根据名字加载预训练权重 weights_dict: 预训练权重 training: 是否为训练 norm_decay: 在预测时计算moving average时的衰减率 norm_epsilon: 方差加上极小的数,防止除以0的情况 Returns ------- conv: 经过52层卷积计算之后的结果, 输入图片为416x416x3,则此时输出的结果shape为13x13x1024 route1: 返回第26层卷积计算结果52x52x256, 供后续使用 route2: 返回第43层卷积计算结果26x26x512, 供后续使用 conv_index: 卷积层计数,方便在加载预训练模型时使用 """ with tf.variable_scope('darknet53'): # 416,416,3 -> 416,416,32 conv = self._conv2d_layer(inputs, filters_num = 32, kernel_size = 3, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 # 416,416,32 -> 208,208,64 conv, conv_index = self._Residual_block(conv, conv_index = conv_index, filters_num = 64, blocks_num = 1, training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) # 208,208,64 -> 104,104,128 conv, conv_index = self._Residual_block(conv, conv_index = conv_index, filters_num = 128, blocks_num = 2, training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) # 104,104,128 -> 52,52,256 conv, conv_index = self._Residual_block(conv, conv_index = conv_index, filters_num = 256, blocks_num = 8, training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) # route1 = 52,52,256 route1 = conv # 52,52,256 -> 26,26,512 conv, conv_index = self._Residual_block(conv, conv_index = conv_index, filters_num = 512, blocks_num = 8, training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) # route2 = 26,26,512 route2 = conv # 26,26,512 -> 13,13,1024 conv, conv_index = self._Residual_block(conv, conv_index = conv_index, filters_num = 1024, blocks_num = 4, training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) # route3 = 13,13,1024 return route1, route2, conv, conv_index# 输出两个网络结果# 第一个是进行5次卷积后,用于下一次逆卷积的,卷积过程是1X1,3X3,1X1,3X3,1X1# 第二个是进行5+2次卷积,作为一个特征层的,卷积过程是1X1,3X3,1X1,3X3,1X1,3X3,1X1def _yolo_block(self, inputs, filters_num, out_filters, conv_index, training = True, norm_decay = 0.99, norm_epsilon = 1e-3): """ Introduction ------------ yolo3在Darknet53提取的特征层基础上,又加了针对3种不同比例的feature map的block,这样来提高对小物体的检测率 Parameters ---------- inputs: 输入特征 filters_num: 卷积核数量 out_filters: 最后输出层的卷积核数量 conv_index: 卷积层数序号,方便根据名字加载预训练权重 training: 是否为训练 norm_decay: 在预测时计算moving average时的衰减率 norm_epsilon: 方差加上极小的数,防止除以0的情况 Returns ------- route: 返回最后一层卷积的前一层结果 conv: 返回最后一层卷积的结果 conv_index: conv层计数 """ conv = self._conv2d_layer(inputs, filters_num = filters_num, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 conv = self._conv2d_layer(conv, filters_num = filters_num * 2, kernel_size = 3, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 conv = self._conv2d_layer(conv, filters_num = filters_num, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 conv = self._conv2d_layer(conv, filters_num = filters_num * 2, kernel_size = 3, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 conv = self._conv2d_layer(conv, filters_num = filters_num, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 route = conv conv = self._conv2d_layer(conv, filters_num = filters_num * 2, kernel_size = 3, strides = 1, name = "conv2d_" + str(conv_index)) conv = self._batch_normalization_layer(conv, name = "batch_normalization_" + str(conv_index), training = training, norm_decay = norm_decay, norm_epsilon = norm_epsilon) conv_index += 1 conv = self._conv2d_layer(conv, filters_num = out_filters, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index), use_bias = True) conv_index += 1 return route, conv, conv_index# 返回三个特征层的内容def yolo_inference(self, inputs, num_anchors, num_classes, training = True): """ Introduction ------------ 构建yolo模型结构 Parameters ---------- inputs: 模型的输入变量 num_anchors: 每个grid cell负责检测的anchor数量 num_classes: 类别数量 training: 是否为训练模式 """ conv_index = 1 # route1 = 52,52,256、route2 = 26,26,512、route3 = 13,13,1024 conv2d_26, conv2d_43, conv, conv_index = self._darknet53(inputs, conv_index, training = training, norm_decay = self.norm_decay, norm_epsilon = self.norm_epsilon) with tf.variable_scope('yolo'): #--------------------------------------# # 获得第一个特征层 #--------------------------------------# # conv2d_57 = 13,13,512,conv2d_59 = 13,13,255(3x(80+5)) conv2d_57, conv2d_59, conv_index = self._yolo_block(conv, 512, num_anchors * (num_classes + 5), conv_index = conv_index, training = training, norm_decay = self.norm_decay, norm_epsilon = self.norm_epsilon) #--------------------------------------# # 获得第二个特征层 #--------------------------------------# conv2d_60 = self._conv2d_layer(conv2d_57, filters_num = 256, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) conv2d_60 = self._batch_normalization_layer(conv2d_60, name = "batch_normalization_" + str(conv_index),training = training, norm_decay = self.norm_decay, norm_epsilon = self.norm_epsilon) conv_index += 1 # unSample_0 = 26,26,256 unSample_0 = tf.image.resize_nearest_neighbor(conv2d_60, [2 * tf.shape(conv2d_60)[1], 2 * tf.shape(conv2d_60)[1]], name='upSample_0') # route0 = 26,26,768 route0 = tf.concat([unSample_0, conv2d_43], axis = -1, name = 'route_0') # conv2d_65 = 52,52,256,conv2d_67 = 26,26,255 conv2d_65, conv2d_67, conv_index = self._yolo_block(route0, 256, num_anchors * (num_classes + 5), conv_index = conv_index, training = training, norm_decay = self.norm_decay, norm_epsilon = self.norm_epsilon) #--------------------------------------# # 获得第三个特征层 #--------------------------------------# conv2d_68 = self._conv2d_layer(conv2d_65, filters_num = 128, kernel_size = 1, strides = 1, name = "conv2d_" + str(conv_index)) conv2d_68 = self._batch_normalization_layer(conv2d_68, name = "batch_normalization_" + str(conv_index), training=training, norm_decay=self.norm_decay, norm_epsilon = self.norm_epsilon) conv_index += 1 # unSample_1 = 52,52,128 unSample_1 = tf.image.resize_nearest_neighbor(conv2d_68, [2 * tf.shape(conv2d_68)[1], 2 * tf.shape(conv2d_68)[1]], name='upSample_1') # route1= 52,52,384 route1 = tf.concat([unSample_1, conv2d_26], axis = -1, name = 'route_1') # conv2d_75 = 52,52,255 _, conv2d_75, _ = self._yolo_block(route1, 128, num_anchors * (num_classes + 5), conv_index = conv_index, training = training, norm_decay = self.norm_decay, norm_epsilon = self.norm_epsilon) return [conv2d_59, conv2d_67, conv2d_75]预测结果如下: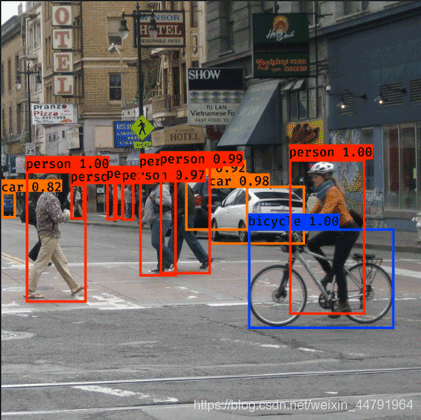
相比于yolo1、2都有很大提升。
4、SSD
对于ssd网络我专门写了两篇blog用于描述其训练过程和预测过程,大家可以看一下SSD算法预测部分;SSD算法预测部分。
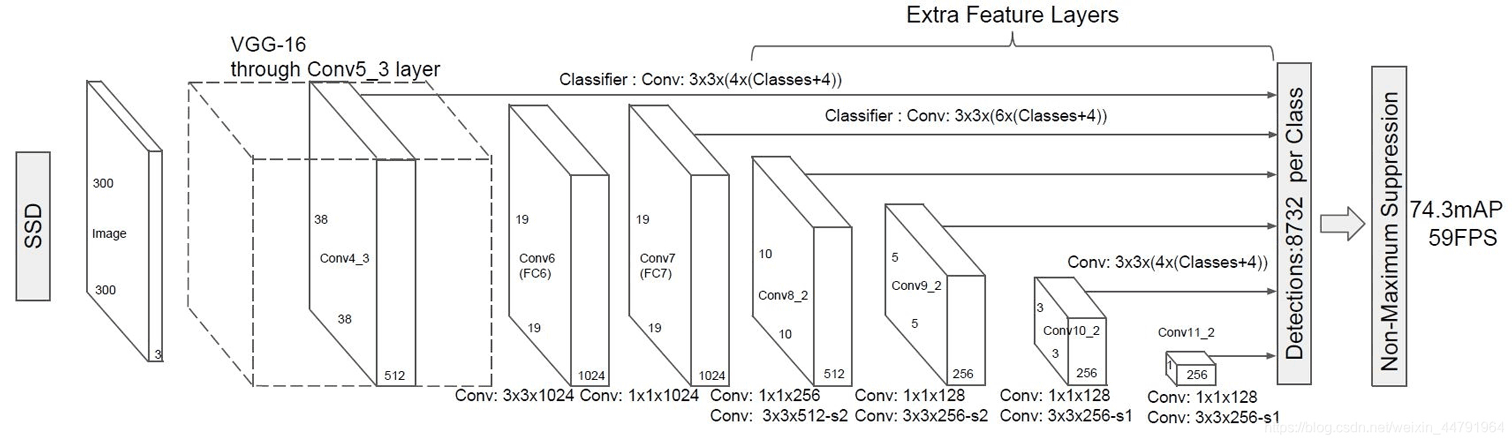
SSD其实也是一个多特征层网络,其一共具有11层,前半部分结构是VGG16。
其网络结构如下:
1、首先通过了多个3X3卷积层、5次步长为2的最大池化取出特征,形成了5个Block,其中第四个Block的shape为(?,38,38,512),该层用于提取小目标(多次卷积后大目标的特征保存的更好,小目标特征会消失,需要在比较靠前的层提取小目标特征)。
2、进行一次卷积核膨胀dilate(关于卷积核膨胀的概念可以去网上搜索以下哈)。
3、读取第七个Block7的特征,shape为(?,19,19,1024)
4、分别利用1x1和3x3卷积提取特征,在3x3卷积的时候使用步长2,缩小特征数。获取第八个Block8的特征,shape为(?,10,10,512)
5、重复步骤4,获得9、10、11卷积层的特征,shape分别为(?,5,5,256)、(?,3,3,256)、(?,1,1,256)
其网络部分代码为:
# =============================网络部分============================= ############################################################## 该部分供SSDNet的net函数调用,用于建立网络 ## 返回predictions, localisations, logits, end_points #############################################################def ssd_net(inputs, num_classes=SSDNet.default_params.num_classes, feat_layers=SSDNet.default_params.feat_layers, anchor_sizes=SSDNet.default_params.anchor_sizes, anchor_ratios=SSDNet.default_params.anchor_ratios, normalizations=SSDNet.default_params.normalizations, is_training=True, dropout_keep_prob=0.5, prediction_fn=slim.softmax, reuse=None, scope='ssd_300_vgg'): """SSD net definition. """ # 建立网络 end_points = {} with tf.variable_scope(scope, 'ssd_300_vgg', [inputs], reuse=reuse): # Block1 ''' 相当于执行: net = self.conv2d(x,64,[3,3],scope = 'conv1_1') net = self.conv2d(net,64,[3,3],scope = 'conv1_2') ''' # (300,300,3) -> (300,300,64) -> (150,150,64) net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1') end_points['block1'] = net net = slim.max_pool2d(net, [2, 2], scope='pool1') # Block 2. ''' 相当于执行: net = self.conv2d(net,128,[3,3],scope = 'conv2_1') net = self.conv2d(net,128,[3,3],scope = 'conv2_2') ''' # (150,150,64) -> (150,150,128) -> (75,75,128) net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2') end_points['block2'] = net net = slim.max_pool2d(net, [2, 2], scope='pool2') # Block 3. ''' 相当于执行: net = self.conv2d(net,256,[3,3],scope = 'conv3_1') net = self.conv2d(net,256,[3,3],scope = 'conv3_2') net = self.conv2d(net,256,[3,3],scope = 'conv3_3') ''' # (75,75,128) -> (75,75,256) -> (38,38,256) net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3') end_points['block3'] = net net = slim.max_pool2d(net, [2, 2],stride = 2,padding = "SAME", scope='pool3') # Block 4. # 三次卷积 # (38,38,256) -> (38,38,512) -> block4_net -> (19,19,512) net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4') end_points['block4'] = net net = slim.max_pool2d(net, [2, 2],padding = "SAME", scope='pool4') # Block 5. # 三次卷积 # (19,19,512)->(19,19,512) net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5') end_points['block5'] = net net = slim.max_pool2d(net, [3, 3], stride=1,padding = "SAME", scope='pool5') # Block 6: dilate # 卷积核膨胀 # (19,19,512)->(19,19,1024) net = slim.conv2d(net, 1024, [3, 3], rate=6, scope='conv6') end_points['block6'] = net net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 7: 1x1 conv # (19,19,1024)->(19,19,1024) net = slim.conv2d(net, 1024, [1, 1], scope='conv7') end_points['block7'] = net net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 8/9/10/11: 1x1 and 3x3 convolutions stride 2 (except lasts). # (19,19,1024)->(19,19,256)->(10,10,512) end_point = 'block8' with tf.variable_scope(end_point): net = slim.conv2d(net, 256, [1, 1], scope='conv1x1') net = custom_layers.pad2d(net, pad=(1, 1)) net = slim.conv2d(net, 512, [3, 3], stride=2, scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block9' # (10,10,512)->(10,10,128)->(5,5,256) with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = custom_layers.pad2d(net, pad=(1, 1)) net = slim.conv2d(net, 256, [3, 3], stride=2, scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block10' # (5,5,256)->(5,5,128)->(3,3,256) with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block11' # (3,3,256)->(1,1,256) with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net # 预测和定位层 predictions = [] logits = [] localisations = [] for i, layer in enumerate(feat_layers): with tf.variable_scope(layer + '_box'): p, l = ssd_multibox_layer(end_points[layer], num_classes, anchor_sizes[i], anchor_ratios[i], normalizations[i]) predictions.append(prediction_fn(p)) logits.append(p) localisations.append(l) return predictions, localisations, logits, end_pointsssd_net.default_image_size = 300预测结果为: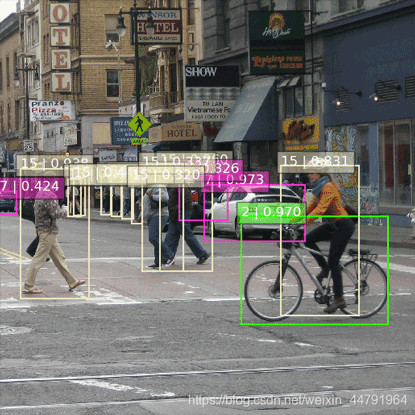
ssd的预测效果也还可以。
总结
随着yolo123版本的更新,预测效果越来越好,但是预测速度也不断在下降,yolo3的速度还是比较快的,官网在推出yolo3后直接下了yolo2和yolo1,可以看出来很自信……其优秀的检测结果主要的得益于残差网络、反卷积和多特征层的思想,这些特点使其可以很好的提取特征,同时训练效果好,且对大目标和小目标都有很好的检测效果。
SSD同样采用多特征层的思想,但是其网络结构相比于yolo3更加简单,其利用VGG16进行特征提取,同样具有比较优秀的效果。
以上就是python目标检测yolo1 yolo2 yolo3和SSD网络结构对比的详细内容,更多关于yolo1 yolo2 yolo3与SSD网络结构的资料请关注我们其它相关文章!
相关推荐
-

python目标检测IOU的概念与示例
目录 学习前言 什么是IOU IOU的特点 全部代码 学习前言 神经网络的应用还有许多,目标检测就是其中之一,目标检测中有一个很重要的概念便是IOU 什么是IOU IOU是一种评价目标检测器的一种指标. 下图是一个示例:图中绿色框为实际框(好像不是很绿……),红色框为预测框,当我们需要判断两个框之间的关系时,需要用什么指标呢? 此时便需要用到IOU. 计算IOU的公式为: 可以看到IOU是一个比值,即交并比. 在分子部分,值为预测框和实际框之间的重叠区域: 在分母部分,值为预测框和实际框所占有的
-
python目标检测SSD算法预测部分源码详解
目录 学习前言 什么是SSD算法 ssd_vgg_300主体的源码 学习前言 ……学习了很多有关目标检测的概念呀,咕噜咕噜,可是要怎么才能进行预测呢,我看了好久的SSD源码,将其中的预测部分提取了出来,训练部分我还没看懂 什么是SSD算法 SSD是一种非常优秀的one-stage方法,one-stage算法就是目标检测和分类是同时完成的,其主要思路是均匀地在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类与回归,整个过程只需要一步,所以其优势是速度
-
Python Flask搭建yolov3目标检测系统详解流程
[人工智能项目]Python Flask搭建yolov3目标检测系统 后端代码 from flask import Flask, request, jsonify from PIL import Image import numpy as np import base64 import io import os from backend.tf_inference import load_model, inference os.environ['CUDA_VISIBLE_DEVICES'] = '
-
python目标检测SSD算法训练部分源码详解
目录 学习前言 讲解构架 模型训练的流程 1.设置参数 2.读取数据集 3.建立ssd网络. 4.预处理数据集 5.框的编码 6.计算loss值 7.训练模型并保存 开始训练 学习前言 ……又看了很久的SSD算法,今天讲解一下训练部分的代码.预测部分的代码可以参照https://blog.csdn.net/weixin_44791964/article/details/102496765 讲解构架 本次教程的讲解主要是对训练部分的代码进行讲解,该部分讲解主要是对训练函数的执行过程与执行思路进行详
-
python目标检测yolo1 yolo2 yolo3和SSD网络结构对比
目录 睿智的目标检测5——yolo1.yolo2.yolo3和SSD的网络结构汇总对比 学习前言各个网络的结构图与其实现代码1.yolo12.yolo23.yolo34.SSD 总结 学习前言 ……最近在学习yolo1.yolo2和yolo3,事实上它们和SSD网络有一定的相似性,我准备汇总一下,看看有什么差别. 各个网络的结构图与其实现代码 1.yolo1 由图可见,其进行了二十多次卷积还有四次最大池化,其中3x3卷积用于提取特征,1x1卷积用于压缩特征,最后将图像压缩到7x7xfilter的
-
python目标检测yolo2详解及预测代码复现
目录 前言 实现思路 1.yolo2的预测思路(网络构建思路) 2.先验框的生成 3.利用先验框对网络的输出进行解码 4.进行得分排序与非极大抑制筛选 实现结果 前言 ……最近在学习yolo1.yolo2和yolo3,写这篇博客主要是为了让自己对yolo2的结构有更加深刻的理解,同时要理解清楚先验框的含义. 尽量配合代码观看会更容易理解. 直接下载 实现思路 1.yolo2的预测思路(网络构建思路) YOLOv2使用了一个新的分类网络DarkNet19作为特征提取部分,DarkNet19包含19
-
python目标检测yolo3详解预测及代码复现
目录 学习前言 实现思路 1.yolo3的预测思路(网络构建思路) 2.利用先验框对网络的输出进行解码 3.进行得分排序与非极大抑制筛选 实现结果 学习前言 对yolo2解析完了之后当然要讲讲yolo3,yolo3与yolo2的差别主要在网络的特征提取部分,实际的解码部分其实差距不大 代码下载 本次教程主要基于github中的项目点击直接下载,该项目相比于yolo3-Keras的项目更容易看懂一些,不过它的许多代码与yolo3-Keras相同. 我保留了预测部分的代码,在实际可以通过执行dete
-
python目标检测实现黑花屏分类任务示例
目录 背景 核心技术与架构图 技术实现 1.数据的标注 2.训练过程 3.损失的计算 4.对输出内容的处理 效果展示 总结 背景 视频帧的黑.花屏的检测是视频质量检测中比较重要的一部分,传统做法是由测试人员通过肉眼来判断视频中是否有黑.花屏的现象,这种方式不仅耗费人力且效率较低. 为了进一步节省人力.提高效率,一种自动的检测方法是大家所期待的.目前,通过分类网络模型对视频帧进行分类来自动检测是否有黑.花屏是比较可行且高效的. 然而,在项目过程中,视频帧数据的收集比较困难,数据量较少,部分花屏和正
-
python:目标检测模型预测准确度计算方式(基于IoU)
训练完目标检测模型之后,需要评价其性能,在不同的阈值下的准确度是多少,有没有漏检,在这里基于IoU(Intersection over Union)来计算. 希望能提供一些思路,如果觉得有用欢迎赞我表扬我~ IoU的值可以理解为系统预测出来的框与原来图片中标记的框的重合程度.系统预测出来的框是利用目标检测模型对测试数据集进行识别得到的. 计算方法即检测结果DetectionResult与GroundTruth的交集比上它们的并集,如下图: 蓝色的框是:GroundTruth 黄色的框是:Dete
-
python目标检测给图画框,bbox画到图上并保存案例
我就废话不多说了,还是直接上代码吧! import os import xml.dom.minidom import cv2 as cv ImgPath = 'C:/Users/49691/Desktop/gangjin/gangjin_test/JPEGImages/' AnnoPath = 'C:/Users/49691/Desktop/gangjin/gangjin_test/Annotations/' #xml文件地址 save_path = '' def draw_anchor(Img
-
python目标检测YoloV4当中的Mosaic数据增强方法
目录 什么是Mosaic数据增强方法 实现思路 全部代码 什么是Mosaic数据增强方法 Yolov4的mosaic数据增强参考了CutMix数据增强方式,理论上具有一定的相似性! CutMix数据增强方式利用两张图片进行拼接. 但是mosaic利用了四张图片,根据论文所说其拥有一个巨大的优点是丰富检测物体的背景!且在BN计算的时候一下子会计算四张图片的数据!就像下图这样: 实现思路 1.每次读取四张图片. 2.分别对四张图片进行翻转.缩放.色域变化等,并且按照四个方向位置摆好. 3.进行图片的