python OpenCV实现图像特征匹配示例详解
目录
- 目标
- Brute-Force匹配器的基础
- 使用ORB描述符进行Brute-Force匹配
- 什么是Matcher对象?
- 带有SIFT描述符和比例测试的Brute-Force匹配
- 基于匹配器的FLANN
目标
在本章中,将学习:
- 如何将一个图像中的特征与其他图像进行匹配
- 在OpenCV中使用Brute-Force匹配器和FLANN匹配器
Brute-Force匹配器的基础
暴力匹配器很简单。它使用第一组中一个特征的描述符,并使用一些距离计算将其与第二组中的所有其他特征匹配。并返回最接近的一个。 对于BF匹配器,首先必须使cv.BFMatcher() 创建BFMatcher对象。 它需要两个可选参数:
- 第一个参数是normType,它指定要使用的距离测量。默认情况下为
cv2.NORM_L2。对于SIFT, SURF等(也有cv2.NORM_L1)很有用。 对于基于二进制字符串的描述符,例如ORB,BRIEF,BRISK等,应使用cv2.NORM_HAMMING,该函数使用汉明距离作为度量。如果ORB使用WTA_K == 3或 4,则应使用 cv.NORM_HAMMING2。 - 第二个参数是布尔变量,即
crossCheck,默认情况下为false。如果为true,则Matcher仅返回具有值(i,j)(i,j)(i,j)的那些匹配项,以使集合A中的第i个描述符具有集合B中的第j个描述符为最佳匹配,反之亦然。即两组中的两个特征应彼此匹配。它提供了一致的结果,并且是D.Lowe在SIFT论文中提出的比率测试的良好替代方案。 创建之后,两个重要的方法是 BFMatcher.match(): 返回最佳匹配BFMatcher.knnMatch(): 返回k个最佳匹配,其中k由用户指定。 当需要对此做其他工作时,它可能会很有用。 就像使用cv.drawKeypoints()绘制关键点一样,cv.drawMatches()可以帮助绘制出匹配项。它水平堆叠两张图像,并绘制从第一张图像到第二张图像的线,以显示最佳匹配。还有
cv.drawMatchesKnn绘制所有k个最佳匹配。如果 k=2 ,它将为每个关键点绘制两条匹配线。 因此,如果要选择性地绘制,则必须通过掩码。 下面来看一个SIFT和ORB的示例(两者都使用不同的距离测量)。
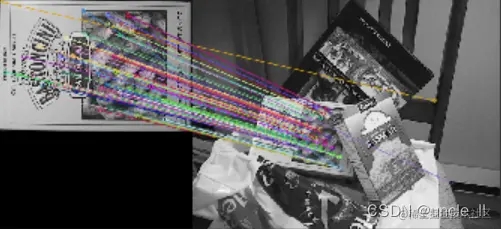
使用ORB描述符进行Brute-Force匹配
下面将看到一个有关如何在两个图像之间匹配特征的简单示例。在这种情况下,有一 个queryImage和trainImage。将尝试使用特征匹配在trainImage中找到queryImage。(图像 是/samples/data/box.png和/samples/data/box_in_scene.png) 图像素材可以去github上找github.com/opencv/open…
使用ORB描述符来匹配特征。因此,从加载图像,查找描述符等开始。之后创建一个距离测量值为cv2.NORM_HAMMING的BFMatcher对象(因为使用的是ORB),并且启用了CrossCheck以获得更好的结果。然后,使用Matcher.match()方法来获取两个图像中的最佳匹配。按照距离的升序对它们进行排序,以使最佳匹配(低距离) 排在前面。然后我们只抽出前10的匹配(只是为了提高可见度。您可以根据需要增加它)
# create bfmatcher object bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True) # match descriptors matches = bf.match(des1, des2) # sort them in the order of their distance matches = sorted(matches, key=lambda x: x.distance) # draw first 10 matches img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:10], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS) plt.imshow(img3) plt.show()
结果如下:

什么是Matcher对象?
matchs = bf.match(des1,des2) 的结果DMatch对象的列表。该DMatch对象具有以下属性:
DMatch.distance-描述符之间的距离,越低越好DMatch.trainIdx-train描述符中的描述符索引DMatch.queryIdx-query描述符中的描述符索引DMatch.imgIdx-train 图像的索引。
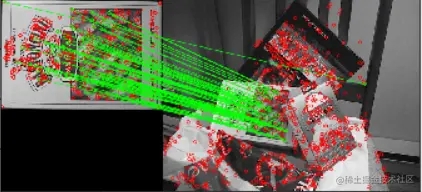
带有SIFT描述符和比例测试的Brute-Force匹配
这次,将使用BFMatcher.knnMatch()获得k个最佳匹配。在此示例中,将k = 2,以便可以应用D.Lowe在他的论文中阐述的比例测试。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img1 = cv2.imread('box2.png', cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread('box_in_scene.png', cv2.IMREAD_GRAYSCALE)
# initate sift detector
sift = cv2.xfeatures2d.SIFT_create()
# find teh keypoints and descriptors with sift
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# BFMatcher with default params
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
# apply ratio test
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append([m])
# cv.drawMatchsKnn expects list of lists as matches.
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, good, None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
plt.imshow(img3)
plt.show()
查看以下结果:
基于匹配器的FLANN
FLANN是近似最近邻的快速库。它包含一组算法,这些算法针对大型数据集中的快速最近邻搜索和高维特征进行了优化。 对于大型数据集,它的运行速度比BFMatcher快。我们将看到第二个基于FLANN的匹配器示例。 对于基于FLANN的匹配器,需要传递两个字典,这些字典指定要使用的算法,其相关参数等。
- 第一个是
IndexParams。对于各种算法,要传递的信息在FLANN文档中进行了说明。概括来说,对于SIFT,SURF等算法,可以通过以下操作:
FLANN_INDEX_KDTREE = 1 index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
当使用ORB时,可以参考下面。根据文档建议使用带注释的值,但在某些情况下未提供必需的参数。其他值也可以正常工作。
FLANN_INDEX_LSH = 6 index_params = dict( algorithm=FLANN_INDEX_LSH, table_number=6, key_size=12, multi_probe_level=1)
第二个字典是SearchParams,它指定索引中的树应递归遍历的次数。 较高的值可提供更好的精度,但也需要更多时间。如果要更改值,请传递 search_params = dict(checks = 100) 有了这些信息,就很容易。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img1 = cv2.imread('box2.png', cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread('box_in_scene.png', cv2.IMREAD_GRAYSCALE)
# initiate sift detector
sift = cv2.xfeatures2d.SIFT_create()
# find the keypoints and descriptors with sift
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# FLANN params
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
# need to draw only good matches, so create a mask
matchesMask = [[0,0] for i in range(len(matches))]
# ratio test as per low's papre
for i, (m, n) in enumerate(matches):
if m.distance < 0.7*n.distance:
matchesMask[i] = [1, 0]
# draw
darw_params = dict(
matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=cv2.DrawMatchesFlags_DEFAULT)
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches, None, **darw_params)
plt.imshow(img3)
plt.show()
查看以下结果
附加资源
- cv2.BFMatcher()
- cv2.NORM_L2
- cv2.NORM_L1
- cv2.NORM_HAMMING
- cv2.NORM_HAMMING2
- cv.drawMatches()
- docs.opencv.org/4.1.2/dc/dc…
- github.com/flann-lib/f…
以上就是python OpenCV实现图像特征匹配示例详解的详细内容,更多关于python OpenCV图像特征匹配的资料请关注我们其它相关文章!
相关推荐
-

python机器学习基础特征工程算法详解
目录 一.机器学习概述 二.数据集的构成 1.数据集存储 2.可用的数据集 3.常用数据集的结构 三.特征工程 1.字典数据特征抽取 2.文本特征抽取 3.文本特征抽取:tf-idf 4.特征预处理:归一化 5.特征预处理:标准化 6.特征预处理:缺失值处理 一.机器学习概述 机器学习是从数据中,自动分析获得规律(模型),并利用规律对未知数据进行预测. 二.数据集的构成 1.数据集存储 机器学习的历史数据通常使用csv文件存储. 不用mysql的原因: 1.文件大的话读取速度慢: 2.格式不符合
-
Python分析特征数据类别与预处理方法速学
目录 前言 一.特征类型判别 二.定量数据特征处理 三.定类数据特征处理 1.LabelEncoding 2.OneHotcoding 优点: 缺点: 应用场景: 无用场景: 代码实现 方法二: 前言 当我们开始准备数据建模.构建机器学习模型的时候,第一时间考虑的不应该是就考虑到选择模型的种类和方法.而是首先拿到特征数据和标签数据进行研究,挖掘特征数据包含的信息以及思考如何更好的处理这些特征数据.那么数据类型本身代表的含义就需要我们进行思考,究竟是定量计算还是进行定类分析更好呢?这就是这篇文章将
-
python神经网络特征金字塔FPN原理
目录 什么是特征金字塔 引入FPN的网络结构举例 什么是特征金字塔 很多文章里面写道特征金字塔这个结构,其实这个结构Very-Easy 目标检测任务和语义分割任务里面常常需要检测小目标,但是小目标比较小呀,可能在原图里面只有几十个像素点.就像这个样子. 我不检测这个猫,我就检测这一片片落叶,是不是每个落叶所占的像素点特别少呢. 答案肯定是的. 最关键的问题就是,像素点少会对目标检测有什么影响! 我这里没有严密的数学推导,就从思想上来说,对于深度卷积网络,从一个特征层卷积到另一个特征层,无论步长是
-
Python机器学习利用随机森林对特征重要性计算评估
目录 1 前言 2 随机森林(RF)简介 3 特征重要性评估 4 举个例子 5 参考文献 1 前言 随机森林是以决策树为基学习器的集成学习算法.随机森林非常简单,易于实现,计算开销也很小,更令人惊奇的是它在分类和回归上表现出了十分惊人的性能,因此,随机森林也被誉为"代表集成学习技术水平的方法". 2 随机森林(RF)简介 只要了解决策树的算法,那么随机森林是相当容易理解的.随机森林的算法可以用如下几个步骤概括: 1.用有抽样放回的方法(bootstrap)从样本集中选取n个样本作为一个
-
Python计算机视觉SIFT尺度不变的图像特征变换
目录 图像特征-SIFT尺度不变特征变换 1.1图像尺度空间 1.2多分辨率金字塔 1.3高斯差分金字塔 1.4DoG空间极值检测 1.5关键点的精确定位 1.6消除边界响应 1.7特征点的主方向 1.8生成特征描述 OpenCV SIFT函数 图像特征-SIFT尺度不变特征变换 1.1图像尺度空间 在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然后计算机要具有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同尺度下都存在的特点. 尺度空间的获取
-
python深度学习tensorflow1.0参数和特征提取
目录 tf.trainable_variables()提取训练参数 具体实例 tf.trainable_variables()提取训练参数 在tf中,参与训练的参数可用 tf.trainable_variables()提取出来,如: #取出所有参与训练的参数 params=tf.trainable_variables() print("Trainable variables:------------------------") #循环列出参数 for idx, v in enumera
-
caffe的python接口caffemodel参数及特征抽取
目录 前言 前言 如果用公式 y=f(wx+b) 来表示整个运算过程的话,那么w和b就是我们需要训练的东西,w称为权值,在cnn中也可以叫做卷积核(filter),b是偏置项.f是激活函数,有sigmoid.relu等.x就是输入的数据. 数据训练完成后,保存的caffemodel里面,实际上就是各层的w和b值. 我们运行代码: deploy=root + 'mnist/deploy.prototxt' #deploy文件 caffe_model=root + 'mnist/lenet_ite
-
Python OpenCV特征检测之特征匹配方式详解
目录 前言 一.暴力匹配器 二.FLANN匹配器 前言 获得图像的关键点后,可通过计算得到关键点的描述符.关键点描述符可用于图像的特征匹配.通常,在计算图A是否包含图B的特征区域时,将图A称做训练图像,将图B称为查询图像.图A的关键点描述符称为训练描述符,图B的关键点描述符称为查询描述符. 一.暴力匹配器 暴力匹配器使用描述符进行特征比较.在比较时,暴力匹配器首先在查询描述符中取一个关键点的描述符,将其与训练描述符中的所有关键点描述符进行比较,每次比较后会给出一个距离值,距离最小的值对应最佳
-
Python OpenCV对图像进行模糊处理详解流程
其实我们平时在深度学习中所说的卷积操作,在 opencv 中也可以进行,或者说是类似操作.那么它是什么操作呢?它就是图像的模糊(滤波)处理. 均值滤波 使用 opencv 中的cv2.blur(src, ksize)函数.其参数说明是: src: 原图像 ksize: 模糊核大小 原理:它只取内核区域下所有像素的平均值并替换中心元素.3x3 标准化的盒式过滤器如下所示: 特征:核中区域贡献率相同. 作用:对于椒盐噪声的滤除效果比较好. # -*-coding:utf-8-*- ""&q
-
Python实现统计图像连通域的示例详解
目录 数组统计函数 连通域标记 连通域统计 数组统计函数 ndimage提供一系列函数,可以计算标注后的数组的相关特征,比如最值.均值.均方根等. 下列函数,如果未作其他说明,那么就有3个参数,分别是(input, labels=None, index=None),其中input为输入数组:labels为input的标签,形状和input相同:index为整数或者整数数列,为用于计算的label. 函数 物理量 函数 物理量 mean 平均值 center_of_mass 质心 maximum
-
Python+OpenCV人脸检测原理及示例详解
关于opencv OpenCV 是 Intel 开源计算机视觉库 (Computer Version) .它由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法. OpenCV 拥有包括 300 多个 C 函数的跨平台的中.高层 API .它不依赖于其它的外部库 -- 尽管也可以使用某些外部库. OpenCV 对非商业应用和商业应用都是免费 的.同时 OpenCV 提供了对硬件的访问,可以直接访问摄像头,并且 opencv 还提供了一个简单的 GUI(graph
-
Python OpenCV实现图像模板匹配详解
目录 1.什么是模板匹配及模板匹配方法matchTemplate() 介绍 素材准备 2.单模板匹配 2.1 单目标匹配 2.2 多目标匹配 3.多模板匹配 1.什么是模板匹配及模板匹配方法matchTemplate() 介绍 提供一个模板图像,一个目标图像,且满足模板图像是目标图像的一部分,从目标图像中寻找特定的模板图像的过程,即为模板匹配.OpenCV提供了matchTemplate()方法帮助我们实现模板匹配. 该方法语法如下: cv2.matchTemplate(image, templ
-
Python+Opencv实现图像模板匹配详解
目录 引言 一.匹配方法 二.匹配单个对象 三.匹配多个对象 引言 什么是模板匹配呢? 看到这里大家是否会觉得很熟悉的感觉涌上心头!在人脸识别是不是也会看见 等等. 模板匹配可以看作是对象检测的一种非常基本的形式.使用模板匹配,我们可以使用包含要检测对象的“模板”来检测输入图像中的对象. 一.匹配方法 cv2.matchTemplate(img, templ, method) 参数:(img: 原始图像.temple: 模板图像.method: 匹配度计算方法) 方法如下: cv2.TM_SQD
-
Python中图像算术运算的示例详解
目录 介绍 算术运算:图像相加 算术运算:图像减法 位运算 介绍 还记得你在小学时学习如何加减数字吗?现在,你也可以对图像做同样的事情! 输入图像可以进行算术运算,例如加法.减法和按位运算(AND.OR.NOT.XOR).这些操作可以帮助提高输入照片的质量. 在本文中,你将了解使用 OpenCV Python 包对图像执行算术和按位运算的步骤.让我们开始吧! 对图像进行算术运算是什么意思? 因此,假设我们希望合并两张单独的照片中的两个像素.我们怎样才能将它们合并? 让我们想象以下场景.第一个像素
-
Python OpenCV实现识别信用卡号教程详解
目录 通过与 OpenCV 模板匹配的 OCR 信用卡 OCR 结果 总结 今天的博文分为三个部分. 在第一部分中,我们将讨论 OCR-A 字体,这是一种专为辅助光学字符识别算法而创建的字体. 然后我们将设计一种计算机视觉和图像处理算法,它可以: 本地化信用卡上的四组四位数字. 提取这四个分组中的每一个,然后单独分割 16 个数字中的每一个. 使用模板匹配和 OCR-A 字体识别 16 个信用卡数字中的每一个. 最后,我们将看一些将信用卡 OCR 算法应用于实际图像的示例. 通过与 OpenCV
-
浅谈Python Opencv中gamma变换的使用详解
伽马变换就是用来图像增强,其提升了暗部细节,简单来说就是通过非线性变换,让图像从暴光强度的线性响应变得更接近人眼感受的响应,即将漂白(相机曝光)或过暗(曝光不足)的图片,进行矫正. 伽马变换的基本形式如下: 大于1时,对图像的灰度分布直方图具有拉伸作用(使灰度向高灰度值延展),而小于1时,对图像的灰度分布直方图具有收缩作用(是使灰度向低灰度值方向靠拢). #分道计算每个通道的直方图 img0 = cv2.imread('12.jpg') hist_b = cv2.calcHist([img0],
-
C++ OpenCV实现物体尺寸测量示例详解
目录 前言 一.图像透视矫正 二.物体定位 三.尺寸测量 四.效果显示 五.源码 总结 前言 本文将使用OpenCV C++ 进行物体尺寸测量.具体来说就是先定位到待测物体的位置,然后测量物体的宽高. 一.图像透视矫正 原图如图所示.本案例的需求是测量图片中两张卡片的尺寸.首先,我们得定位到两张卡片的位置.第一步,我们首先得将白色A4纸切割出来,这样方便定位到两张卡片所在位置.这里用到的算法是图像透视矫正,具体可以参考OpenCV C++案例实战四<图像透视矫正> //图像矫正 void ge