python opencv 直方图反向投影的方法
本文介绍了python opencv 直方图反向投影的方法,分享给大家,具体如下:
目标:
直方图反向投影
原理:
反向投影可以用来做图像分割,寻找感兴趣区间。它会输出与输入图像大小相同的图像,每一个像素值代表了输入图像上对应点属于目标对象的概率,简言之,输出图像中像素值越高的点越可能代表想要查找的目标。直方图投影经常与camshift(追踪算法)算法一起使用。
算法实现的方法,首先要为包含我们感兴趣区域的图像建立直方图(样例要找一片草坪,其他的不要)。被查找的对象最好是占据整个图像(图像里全是草坪)。最好使用颜色直方图,物体的颜色信息比灰度图像更容易被分割和识别。再将颜色直方图投影到输入图像查找目标,也就是找到输入图像中每一个像素点的像素值在直方图中对应的概率,这样就得到一个概率图像,最后设置适当的阈值对概率图像进行二值化。
numpy算法:
建立两幅颜色直方图,目标图像直方图(M),输入图像直方图(I)
import cv2
import numpy as np
from matplotlib import pyplot as plt
#roi图片,就想要找的的图片
roi = cv2.imread('3.jpg')
hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV)
#目标搜索图片
target = cv2.imread('33.jpg')
hsvt = cv2.cvtColor(target,cv2.COLOR_BGR2HSV)
#创建直方图
M = cv2.calcHist([hsv],[0,1],None,[180,256],[0,180,0,256])
I = cv2.calcHist([hsvt],[0,1],None,[180,256],[0,180,0,256])
计算比值:R=MI。反向投影R,根据R这个调色板创建新图像,每一个像素代表这个点事目标的概率。例如,B(x,y)=R[h(x,y),s(x,y),其中H为点(x,y)的色调(hue)值,s为点(x,y)的饱和度(saturation)。最后加入条件B(x,y)=min([B(x,y),1]
h,s,v = cv2.split(hsvt) B = R[h.ravel(),s.ravel()] B = np.minimum(B,1) B = B.reshape(hsvt.shape[:2])
使用圆盘算子做卷积,B=D×B,其中D为卷积核
disc = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))#定义结构形状,5×5的椭圆 B=cv2.filter2D(B,-1,disc)#对图像进行卷积运算 B = np.uint8(B) cv2.normalize(B,B,0,255,cv2.NORM_MINMAX)
其中函数cv2.getStructuringElement是定义结构元素,例如element = cv2.getStructuringElement(cv2.MORPH_CROSS,(5,5)) 定义了一个十字形,5×5的结构
输出图像中灰度最大的地方就是目标位置。如果要找的是一个区域,可以使用一个阈值对图像二值化,这样能得到不错的结果。
ret,thresh = cv2.threshold(B,50,255,0)
opencv反向投影
函数 cv2.calcBackProject()直接实现反向投影,参数与cv2.calcHist基本一致。其中一个参数是要查找的目标的直方图。在使用目标直方图反向投赢钱应该进行归一化处理。返回结果是一个概率图像,然后进行圆盘形状卷积操作,再二值化。
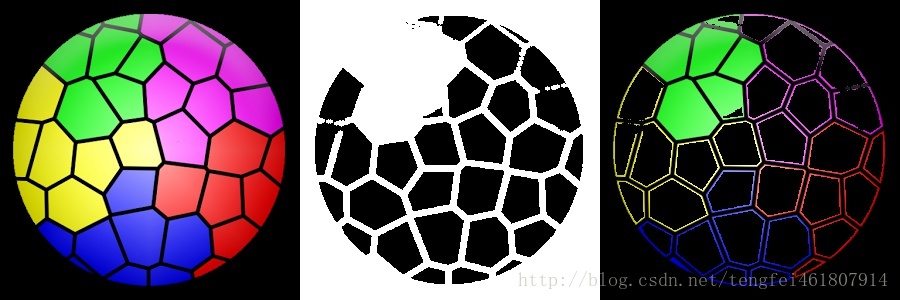
roi区域图片

待搜索图片

结果
import cv2
import numpy as np
from matplotlib import pyplot as plt
#roi图片,就想要找的的图片
roi = cv2.imread('33.jpg')
hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV)
#目标搜索图片
target = cv2.imread('3.jpg')
hsvt = cv2.cvtColor(target,cv2.COLOR_BGR2HSV)
#计算目标直方图
roihist = cv2.calcHist([hsv],[0,1],None,[180,256],[0,180,0,256])
#归一化,参数为原图像和输出图像,归一化后值全部在2到255范围
cv2.normalize(roihist,roihist,0,255,cv2.NORM_MINMAX)
dst = cv2.calcBackProject([hsvt],[0,1],roihist,[0,180,0,256],1)
#卷积连接分散的点
disc = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
dst = cv2.filter2D(dst,-1,disc)
ret,thresh = cv2.threshold(dst,50,255,0)
#使用merge变成通道图像
thresh = cv2.merge((thresh,thresh,thresh))
#蒙板
res = cv2.bitwise_and(target,thresh)
#矩阵按列合并,就是把target,thresh和res三个图片横着拼在一起
res = np.hstack((target,thresh,res))
cv2.imwrite('res.jpg',res)
#显示图像
cv2.imshow('1',res)
cv2.waitKey(0)
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
您可能感兴趣的文章:
- Python OpenCV 直方图的计算与显示的方法示例
- python OpenCV学习笔记之绘制直方图的方法
- 详解python OpenCV学习笔记之直方图均衡化
- python OpenCV学习笔记实现二维直方图
- python OpenCV学习笔记直方图反向投影的实现
相关推荐
-
python OpenCV学习笔记之绘制直方图的方法
本篇文章主要介绍了python OpenCV学习笔记之绘制直方图的方法,小编觉得挺不错的,现在分享给大家,也给大家做个参考.一起跟随小编过来看看吧 官方文档 – https://docs.opencv.org/3.4.0/d1/db7/tutorial_py_histogram_begins.html 直方图会让你对图像的强度分布有一个全面的认识.它是一个在x轴上带有像素值(从0到255,但不总是),在y轴上的图像中对应的像素数量的图. 这只是理解图像的另一种方式.通过观察图像的直方图,你可以直
-
python OpenCV学习笔记直方图反向投影的实现
本文介绍了python OpenCV学习笔记直方图反向投影的实现,分享给大家,具体如下: 官方文档 – https://docs.opencv.org/3.4.0/dc/df6/tutorial_py_histogram_backprojection.html 它用于图像分割或寻找图像中感兴趣的对象.简单地说,它创建一个与我们的输入图像相同大小(但单通道)的图像,其中每个像素对应于属于我们对象的像素的概率.输出图像将使我们感兴趣的对象比其余部分更白. 该怎么做呢?我们创建一个图像的直方图,其中包
-
Python OpenCV 直方图的计算与显示的方法示例
本篇文章介绍如何用OpenCV Python来计算直方图,并简略介绍用NumPy和Matplotlib计算和绘制直方图 直方图的背景知识.用途什么的就直接略过去了.这里直接介绍方法. 计算并显示直方图 与C++中一样,在Python中调用的OpenCV直方图计算函数为cv2.calcHist. cv2.calcHist的原型为: cv2.calcHist(images, channels, mask, histSize, ranges[, hist[, accumulate ]]) #返回his
-
详解python OpenCV学习笔记之直方图均衡化
本文介绍了python OpenCV学习笔记之直方图均衡化,分享给大家,具体如下: 官方文档 – https://docs.opencv.org/3.4.0/d5/daf/tutorial_py_histogram_equalization.html 考虑一个图像,其像素值仅限制在特定的值范围内.例如,更明亮的图像将使所有像素都限制在高值中.但是一个好的图像会有来自图像的所有区域的像素.所以你需要把这个直方图拉伸到两端(如下图所给出的),这就是直方图均衡的作用(用简单的话说).这通常会改善图像的
-

python OpenCV学习笔记实现二维直方图
本文介绍了python OpenCV学习笔记实现二维直方图,分享给大家,具体如下: 官方文档 – https://docs.opencv.org/3.4.0/dd/d0d/tutorial_py_2d_histogram.html 在前一篇文章中,我们计算并绘制了一维的直方图.它被称为一维,因为我们只考虑一个特性,即像素的灰度强度值.但是在二维直方图中,你可以考虑两个特征.通常它用于寻找颜色直方图,其中两个特征是每个像素的色调和饱和度值. 有一个python样例(samples/python/c
-
python opencv 直方图反向投影的方法
本文介绍了python opencv 直方图反向投影的方法,分享给大家,具体如下: 目标: 直方图反向投影 原理: 反向投影可以用来做图像分割,寻找感兴趣区间.它会输出与输入图像大小相同的图像,每一个像素值代表了输入图像上对应点属于目标对象的概率,简言之,输出图像中像素值越高的点越可能代表想要查找的目标.直方图投影经常与camshift(追踪算法)算法一起使用. 算法实现的方法,首先要为包含我们感兴趣区域的图像建立直方图(样例要找一片草坪,其他的不要).被查找的对象最好是占据整个图像(图像里全是
-
python使用numpy实现直方图反向投影示例
最近跟着OpenCV2-Python-Tutorials在学习python_opencv中直方图的反向投影时,第一种方法是使用numpy实现将图中的红色玫瑰分割出来,教程给的代码缺了一句函数,导致实现不出来. 自己加上了后(也不知到这样加对不对)代码和效果如下: 代码: import cv2 import numpy as np roi = cv2.imread('./data/rose_red.jpg') hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV) #t
-
opencv3/C++ 直方图反向投影实例
直方图反向投影: 即取直方图中的值,按直方图面积由大到小,对其对应的像素也由大到小赋予新值.即某种灰度值在图像中所占面积越大,其对应的像素的新值就越大:反之就越小. void calcBackProject( const Mat* images, //源数组/图像:有相同的大小和深度(CV_8U或CV_32F). int nimages,//源图像的数量 const int* channels, //计算反投影的通道列表:通道数量必须与直方图维度相匹配. InputArray hist,//输入
-
Python OpenCV直方图均衡化详解
目录 前言 灰度直方图均衡化 颜色直方图均衡化 前言 图像处理技术是计算机视觉项目的核心,通常是计算机视觉项目中的关键工具,可以使用它们来完成各种计算机视觉任务.在本文中,将介绍如何使用 OpenCV 函数 cv2.equalizeHist() 执行直方图均衡,并将其应用于灰度和彩色图像,cv2.equalizeHist() 函数将亮度归一化并提高图像的对比度. 灰度直方图均衡化 使用 cv2.equalizeHist() 函数来均衡给定灰度图像的对比度: # 加载图像并转换为灰度图像 imag
-
Python OpenCV读取显示视频的方法示例
目标 学习读取视频,显示视频和保存视频. 学习从相机捕捉并显示它. 你将学习以下功能:cv.VideoCapture(),cv.VideoWriter() 从相机中读取视频 通常情况下,我们必须用摄像机捕捉实时画面.提供了一个非常简单的界面.让我们从摄像头捕捉一段视频(我使用的是我笔记本电脑内置的网络摄像头) ,将其转换成灰度视频并显示出来.只是一个简单的任务开始. 要捕获视频,你需要创建一个 VideoCapture 对象.它的参数可以是设备索引或视频文件的名称.设备索引就是指定哪个摄像头的数
-
python opencv旋转图片的使用方法
背景 在图像处理中,有的时候会有对图片进行角度旋转的处理,尤其是在计算机视觉中对于图像扩充,旋转角度扩充图片是一种常见的处理.这种旋转图片的应用场景也比较多,比如用户上传图片是竖着的时候,不好进行处理,也需要对其进行旋转,以便后续算法处理.常见的旋转处理有两种方式,一种是转化为numpy矩阵后,对numpy矩阵进行处理,另外一种是使用opencv自带的函数进行各种变换处理,以实现旋转角度的结果. 原始图像: opencv函数 旋转中常用的函数有以下几个函数 cv2.transpose: 对图像矩
-
Python+OpenCV实现阈值分割的方法详解
目录 一.全局阈值 1.效果图 2.源码 二.滑动改变阈值(滑动条) 1.效果图 2.源码 三.自适应阈值分割 1.效果图 2.源码 3.GaussianBlur()函数去噪 四.参数解释 一.全局阈值 原图: 整幅图采用一个阈值,与图片的每一个像素灰度进行比较,重新赋值: 1.效果图 2.源码 import cv2 import matplotlib.pyplot as plt #设定阈值 thresh=130 #载入原图,并转化为灰度图像 img_original=cv2.imread(r'
-
Python OpenCV实现图片预处理的方法详解
目录 一.图片预处理 1.1 边界填充(padding) 1.2 融合图片(mixup) 1.3 图像阈值 二.滤波器 2.1 均值滤波器 2.2 方框滤波器 2.3 高斯滤波器 2.4 中值滤波 2.5 所有滤波器按照上述顺序输出 一.图片预处理 1.1 边界填充(padding) 方法 : cv2.copyMakeBorder BORDER_REPLICATE:复制法,也就是复制最边缘像素. BORDER_REFLECT:反射法,对感兴趣的图像中的像素在两边进行复制例如:fedcba|abc