Clion ROS开发环境设置技巧
在源环境中启动CLion
需要告知CLion ROS特定的环境变量。通过运行来源工作空间时,将在当前shell中检索这些变量
source ./devel/setup.bash
为CLion提供ROS环境变量的最简单方法是从同一个shell启动IDE。在获取工作空间后,您可以键入同一终端:
在CLion中打开一个ROS项目
在源环境中启动CLion后,执行以下操作之一以打开ROS项目:
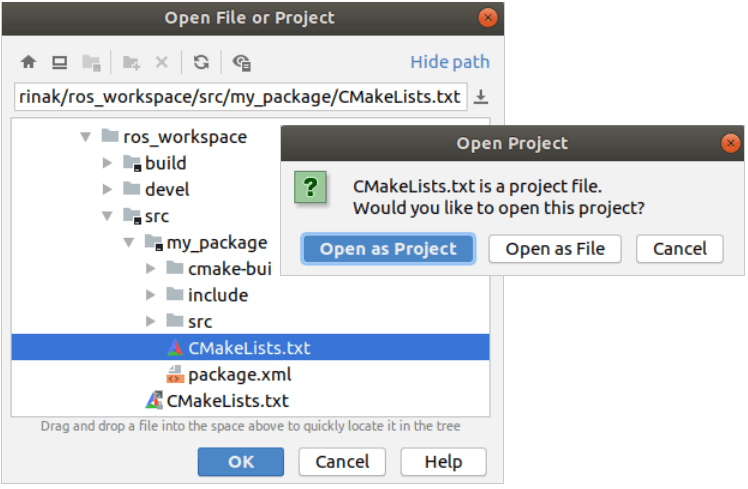
- 单击文件|打开并选择ROS工作区的src目录中的CMakeLists.txt,然后选择Open as Project。
- 单击文件|来自Sources的新CMake项目,并选择工作区的src目录以从中导入项目。
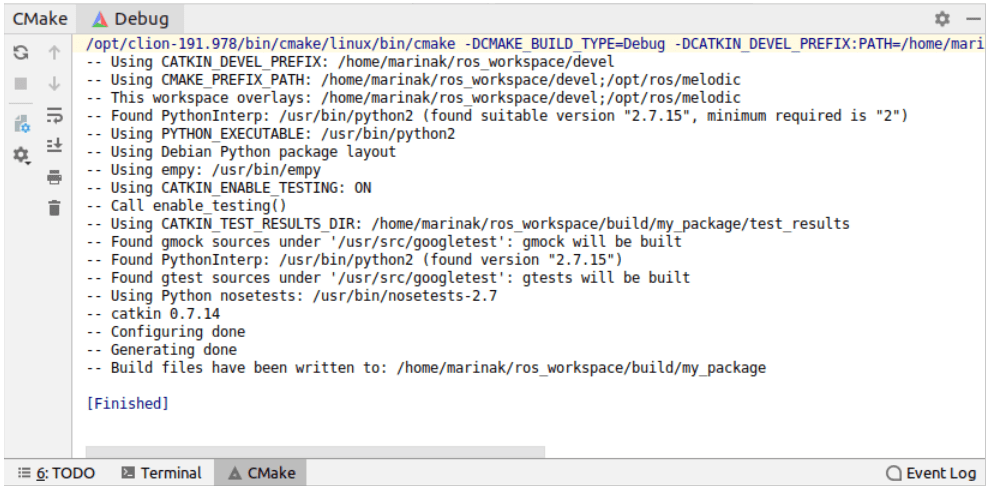
该CMake的工具窗口会显示该项目加载的状态:
设置catkin工作空间的构建路径
默认情况下,CLion将构建输出放在自动创建的cmake-build-debug或cmake-build-release目录中。对于ROS开发,这意味着您将在CLion和运行的控制台中拥有两个不同的版本catkin_make。
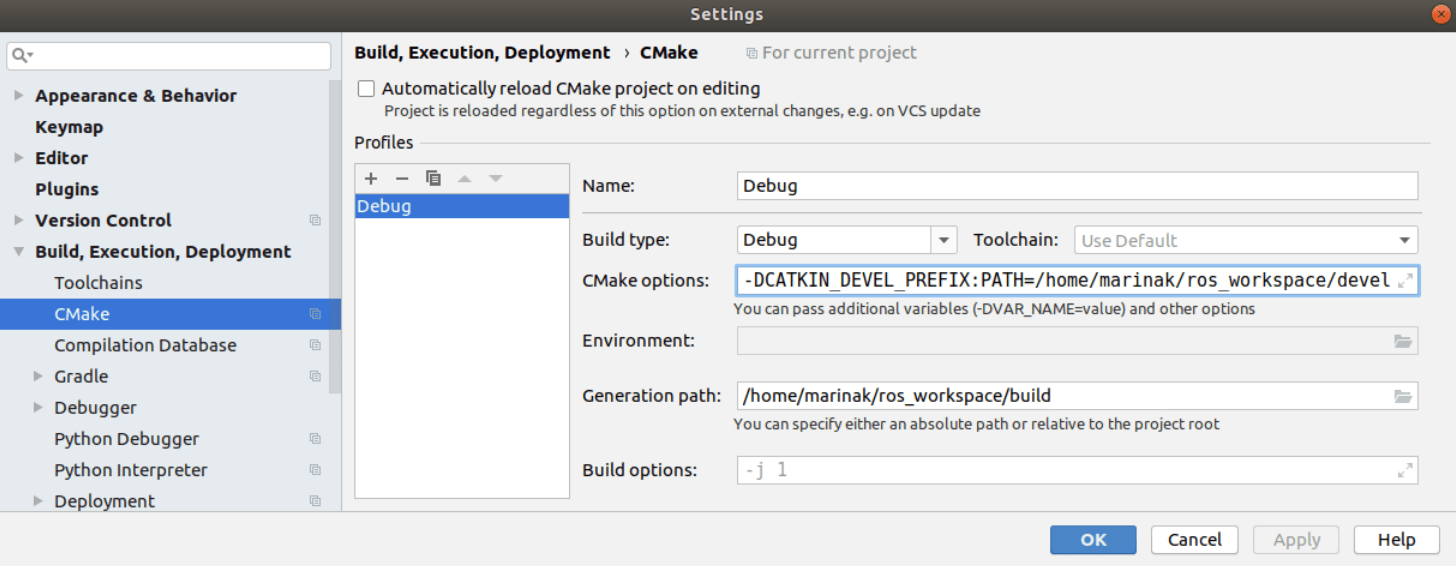
要在IDE和控制台上进行单一构建,需要将CLion构建路径设置为catkin工作区目录。为此,请转到文件|设置Ctrl+Alt+S|构建,执行,部署|CMake并更改两个字段:
- 在生成路径中,设置workspace_folder/build。
- 在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
使用启动文件
您可以在CLion中将ROS节点作为常规应用程序运行和调试。
启动文件无法直接执行,但您可以使用XML语法突出显示和完成编辑它们,并将调试器附加到正在运行的节点。
将调试器附加到正在运行的节点
1、从命令行运行.launch文件。例如
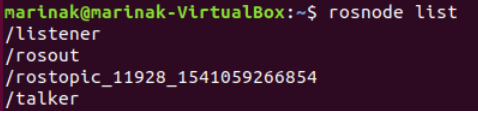
您可以通过该rosnode list命令检查当前运行的节点列表。在我们的示例中,列表将包含talker和listener:
2、呼叫运行|从主菜单附加到处理或按Ctrl+Alt+F5。
3、通过其PID或名称连接到所需节点:

示例:创建基本ROS节点,在CLion中编辑并运行它
在这个例子中,我们将创建一个简单的ROS包,编辑源代码,并从CLion运行节点。我们将在Ubuntu 18.04上使用ROS Melodic,并在ROS wiki上使用编写简单发布者和订阅者(C ++)教程的基本发布者节点。
创建一个基本的ROS包
创建和构建ROS工作区:
mkdir -p ros_workspace/srccd ros_workspace catkin_make
在工作区中,创建一个名为my_package的包:
cd src catkin_create_pkg my_package roscpp rospy std_msgs
启动CLION
来源工作区:
cd ../../../source ./devel/setup.bash
并在同一终端启动CLion
sh /opt/clion-2018.2/bin/clion.sh
在CLion中打开包作为项目
在CLion中,转到File |打开并选择位于包文件夹内的CMakeLists.txt文件,然后选择将其作为项目打开:
添加源文件并编辑CMakeLists.txt
向项目添加新的源文件:右键单击Project树中的src,选择New |C / C ++源文件并将其命名为my_package.cpp。
将整个talker.cpp文件从Publisher和Subscriber教程复制到my_package.cpp中。
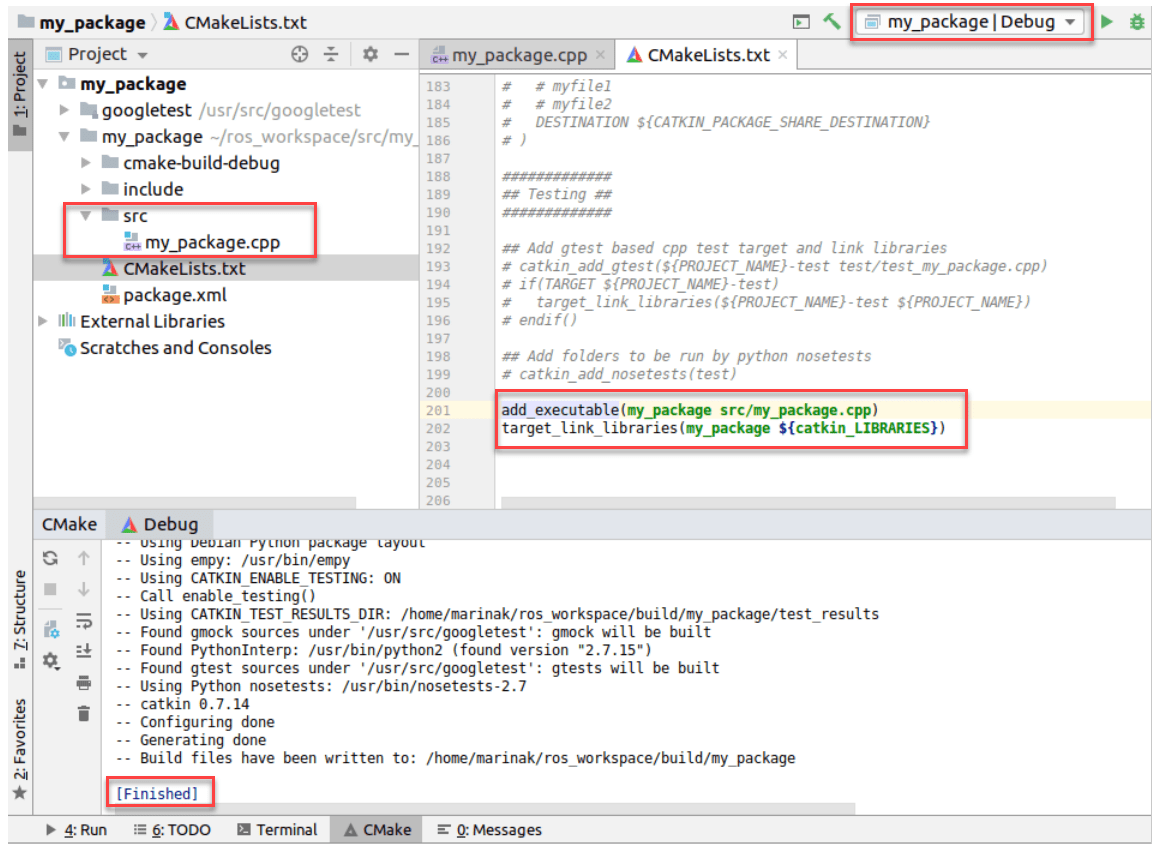
新创建的源添加到的CMakeLists.txt和链接其对应程序库:
add_executable(my_package src/my_package.cpp)
target_link_libraries(my_package ${catkin_LIBRARIES})
之后,重新加载CMake项目,并注意运行/调试配置列表中的my_package:
运行ROS节点
1、在从CLion运行节点之前,在新终端中打开ROS主站:
roscore
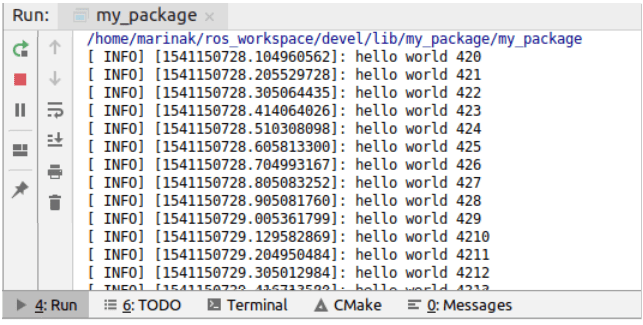
2、在CLion,运行 的my_package配置。运行工具窗口将显示节点输出:
的my_package配置。运行工具窗口将显示节点输出:
3、在单独的终端中,检查当前活动的ROS主题。如果我们打印消息chatter,输出将类似于我们在CLion中看到的内容:
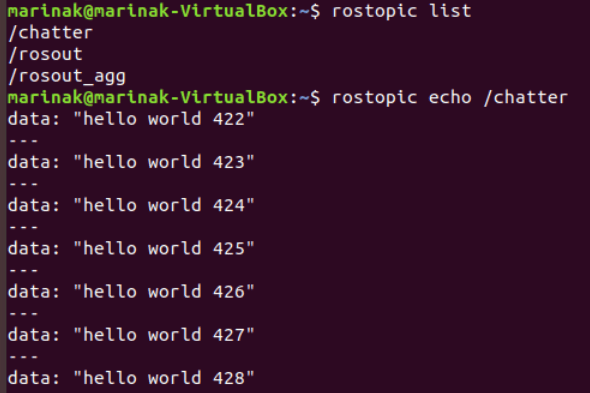
现在,如果我们 在CLion中停止应用程序,该rostopic echo /chatter命令将没有输出。
在CLion中停止应用程序,该rostopic echo /chatter命令将没有输出。
总结
到此这篇关于Clion ROS开发环境设置技巧的文章就介绍到这了,更多相关Clion ROS开发环境设置内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
详解ubuntu20.04下CLion2020.1.3安装配置ROS过程说明
一 下载安装激活CLion 按照网上给的教程就可以 二 配置ROS 1.配置CLion的启动方式 在主目录打开隐藏文件.bashrc,命令是:sudo gedit ~/.bashrc 将CLion的启动文件clion.sh的路径设置为环境变量 PATH 这样在终端里,无论在哪个工作目录下都可以输入clion.sh即可启动CLion. 设置的代码是: export PATH=/home/zyw/CLionPack/clion-2020.1.3/bin:$PATH 这个路径是安装CLion的路径,不
-
CLion中编译ROS工程的配置详细教程
作为一名ROS实践者,之前一直使用带插件的QT createtor编写代码和编译.最近被CLion华丽的外表.丰富的可配置性和调试功能所吸引,官网说明CLion可以用于编译ROS packet,直接导入顶层的CMakeLists或src文件夹即可.初次使用,却发现了一些小问题,需要修改配置解决. 1.启动方式 官网下载clion解压后,第一次运行/bin文件夹中的clion.sh会在系统中创建快捷方式,可以选择"锁定到启动器".网上其他的教程会说每次启动clion要先进入到ROS的工作
-
如何使用clion中配置ROS工程
一.启动法 1:命令行启动clion sudo gedit ~/.bashrc #在bashrc文件中加入 export PATH="/home/gavyn/APPS/clion-2019.1.4/bin:$PATH" #地址根据自己改 #保存退出 source ~/.bashrc #此时即可点击clion图标启动,也可以通过命令行启动,方法如下: #在工作空间(例如:/home/gavyn/桌面/catkin_example)目录下打开终端,执行: source devel/setu
-
Clion ROS开发环境设置技巧
在源环境中启动CLion 需要告知CLion ROS特定的环境变量.通过运行来源工作空间时,将在当前shell中检索这些变量 source ./devel/setup.bash 为CLion提供ROS环境变量的最简单方法是从同一个shell启动IDE.在获取工作空间后,您可以键入同一终端: 在CLion中打开一个ROS项目 在源环境中启动CLion后,执行以下操作之一以打开ROS项目: 单击文件|打开并选择ROS工作区的src目录中的CMakeLists.txt,然后选择Open as Proj
-
使用VScode搭建ROS开发环境的教程详解
俗话说"工欲善其事必先利其器",之前在Ubuntu上运行的ROS项目都是用vim或者gedit编写和修改代码,然后在终端编译运行,很不方便,函数跳转查看都没办法实现.所以今天我决定找一个方便的开发工具,也就是找一个像Windows上的VS那样的集成开发工具(IDE),ROS官网上有一个不同IDE的对比文章,网址在这里 我选择使用VScode.下载安装好VScode后,在扩展栏安装C/C++,CMake,CMake Tools,Code Runner,ROS(deprecated),Chinese
-
微信小程序 Linux开发环境设置详解
微信小程序 Linux开发环境 微信小程序开发工具是用nw.js实现的,这玩意本来就可以跨平台的.搞不懂为什么微信只出了windows和mac版.今天我捣腾了一下,可以在linux下开发微信小程序了.以ubuntu为例: 首先要安装nwjs sdk环境,因为需要devtool的支援, 一定要安装sdk版本. 下载nwjs sdk压缩包之后解压放到你喜欢的位置,并且设置环境变量,nw可执行文件加入到path变量中. 接下来要去提取微信小程序开发工具的package.nw文件,这是nwjs的项目包文
-

SublimeText编译C开发环境设置
使用工具Sublime Text 2MinGW 1.配置环境变量 下载和安装Sublime Text 2和MinGW之后,需要将MinGW安装目录下的Bin目录所在路径添加到环境变量Path中.如图: 2.通过Sublime Text调用C编译器 在Sublime Text中已经默认添加了对C/C++编译器的配置(默认使用g++编译),通过键入Ctrl+B来调用.编译结果会输入到ST的输出栏中,如图: 3.直接将控制台输出结果显示在Sublime Text 2中 如果不想每次编译文件后,还需要切
-
Lua在各个操作系统中的开发环境配置教程
Lua开发环境设置 如果愿意设置您的Lua编程语言环境中,需要用计算机上的以下两个软件,(a)文字编辑器,(b)Lua解释,以及(c)Lua编译器. 文本编辑器 这将被用来输入编写程序.一些编辑器包括Windows记事本,操作系统Edit命令,Brief,Epsilon,Emacs和VIM或VI. 文本编辑器名称和版本可以在不同的操作系统上.例如,记事本可用Windows上,vim或者vi可以在Windows以及Linux或UNIX上使用. 编辑器创建文件称为源文件和包含程序的源代码.在Lua
-
搭建C语言开发环境(Windows平台)汇总
新接触C语言,如何进行C语言开发环境的搭建值得思考并整理 一.在Windows平台配置GNU环境 GNU http://www.gnu.org/ 选择以下GNU环境下载安装到C盘: 1.MinGw 官网下载安装 http://www.mingw.org/ 本站高速下载安装 http://www.jb51.net/softs/192011.html 将C:\MinGW\msys\1.0\msys.bat 发送到桌面快捷方式 在msys.bat命令框中输入 gcc 会得到:sh: gcc: comm
-
vue开发环境配置跨域的方法步骤
本文要实现的是:使用vue-cli搭建的项目在开发时配置跨域,上线后不做任何任何修改,接口也可以访问 production:产品 生产环境 development:开发 开发环境 1.开发环境设置跨域使用工具: vue-cli自带的配置配置 目录 /config/index.js //自行复制黏贴 proxyTable: { '/apis':{ target: 'http://10.1.63.26:19080/', // 后台api changeOrigin: true, //是否跨域 // s
-
详解如何配置CLion作为Qt5开发环境的方法
使用Qt进行程序开发时QtCreator总是不二之选.作为老牌IDE在提供了强大的功能同时也对Qt的支持做了许多优化.如果没有特别的原因你应该使用它. 然而一个顺手的工具将会极大得提升生产效率,而如果你之前使用别的工具进行开发,那么就要斟酌一下学习使用QtCreator的成本了. 所以我将介绍配置CLion(另一个强大的c++ IDE)作为Qt5的开发环境,在利用现有工具链的同时避免了安装另一个大型软件. 准备工作 CLion的安装和激活超出了本文的讨论范围,我们假设你已经安装好了CLion.如
-
Clion配置opencv开发环境的详细过程
之前尝试用vs写opencv的项目,但是因为各种使用习惯很难改过来,加上vs的快捷键和代码智能提示相当的蛋疼,所以尝试着在clion上配置opencv开发环境. 以下是详细配置过程: 预先需要安装的软件: clion:这个是jetbrain家出品的C++集成开发环境,如果你用习惯了idea,pycharm,那么上手这个软件,应该也是比较简单的.相比较巨硬家的visual studio而言,个人觉得vs的快捷键着实蛋疼,而且用的确实少,一些窗口设置不太习惯.这个软件安装比较简单,不详细展开 min
-
Python集成开发环境Pycharm的使用及技巧
目录 一.Python集成开发环境-Pycharm介绍 二.安装步骤: 安装专业版,简体中文永久免费使用 三.创建一个测试程序 四.汉化Pycharm 五. 使用技巧 1.如何更换Python解释器: 2.如何调整编辑器字体及其大小 3.如何调整控制台的字体及其大小 4.如何设置文件编码 5.如何修改文件背景颜色 6.如何让一个tab键代替4个空格键 7.如何自定义Python模版文件 8.显示行号 9.安装插件 10.复制文件路径 11.在文件管理器中打开 12.查看声明或者引用 13.查看项