python实现高斯模糊及原理详解
高斯模糊是一种常见的模糊技术,相关知识点有:高斯函数、二维卷积。
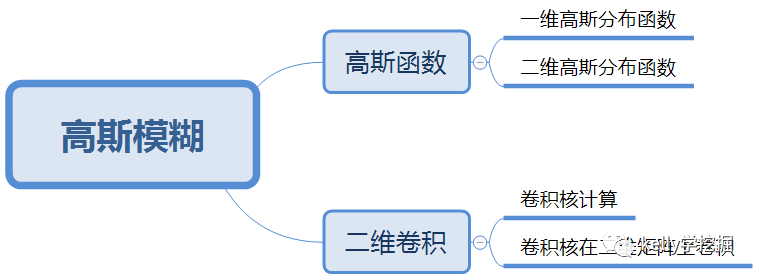
(一)一维高斯分布函数
一维(连续变量)高斯函数形式如下,高斯函数又称“正态分布函数”:
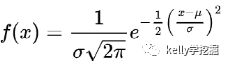
μ是分布函数的均值(或者期望),sigma是标准差。
一维高斯分布函数的图形:
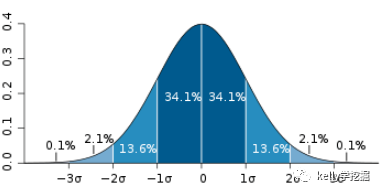
从图可知,以x=0为中心,x取值距离中心越近,概率密度函数值越大,距离中心越远,密度函数值越小。
(二)二维高斯分布函数
二维高斯分布函数的形式:

特别说明,当变量x和y相互独立时,则相关系数ρ=0,二维高斯分布函数可以简化为:

二维高斯分布函数的图形:
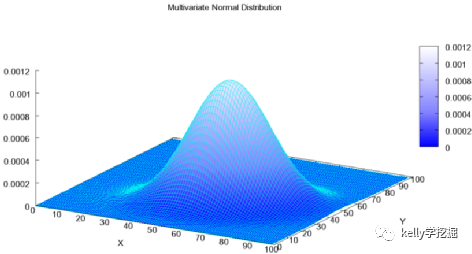
对于一维高斯分布,函数中心是平面上的一个点;而对于二维高斯分布,函数中心是一个三维立体空间上的一个点,即上图中山峰的最顶端处的点。
(三)高斯模糊
高斯模糊本质上一种数据平滑技术,可以用于一维、二维甚至多维空间。数据经高斯模糊处理之后,数据会趋向于周边邻近的其他数据,导致各个数据“趋同”。
在图像领域,各个位置的像素值使用“周边邻居像素点加权平均”重新赋值。对于每个像素点,由于计算时均以当前像素点为中心,所以均值μ=0。使用时有2个超参数需要设置:高斯核大小和高斯函数标准差σ。高斯核大小表示“影响当前点的最大邻域范围”,而标准差表示“邻域中的其他像素点对当前点的影响力”。
从下而上观察下图各个函数图像,各个函数的均值相同,而方差逐步减小。
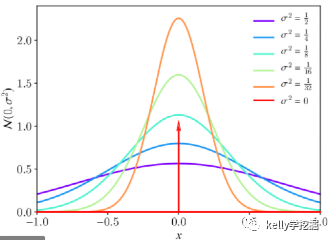
方差衡量数据的分散程度,方差越大,数据越分散,图形就越扁平,数据的集中趋势越弱,应用到高斯模糊中方差越大图形越模糊。
高斯模糊涉及到2个关键技术点:
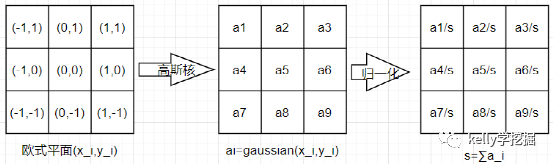
(1)如何计算高斯卷积核
3×3大小的高斯卷积核的计算示意图
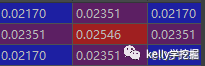
直接计算二维高斯函数值后,卷积核的各个位置取值(截图自pycharm的debug):
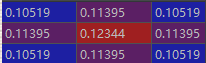
卷积核归一化后的各个位置取值(截图自pycharm的debug):
高斯卷积核的python代码:
def gaussian_kernel(self): kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float) radius = self.kernel_size//2 for y in range(-radius, radius + 1): # [-r, r] for x in range(-radius, radius + 1): # 二维高斯函数 v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2)) kernel[y + radius, x + radius] = v # 高斯函数的x和y值 vs 高斯核的下标值 kernel2 = kernel / np.sum(kernel) return kernel2
(2)如何在二维图像上进行卷积
对于二维矩阵,卷积时卷积核从左向右、从上而下的滑动,对应位置求加权和。一般图像是RGB三通道,需要逐个通道卷积,每个通道是一个二维矩阵。灰度图只有一个通道,直接卷积即可。
自行实现的二维离散卷积的python代码:
def my_conv2d(inputs: np.ndarray, kernel: np.ndarray):
# 计算需要填充的行列数目,这里假定mode为“same”
# 一般卷积核的hw都是奇数,这里实现方式也是基于奇数尺寸的卷积核
h, w = inputs.shape
kernel = kernel[::-1, ...][..., ::-1] # 卷积的定义,必须旋转180度
h1, w1 = kernel.shape
h_pad = (h1 - 1) // 2
w_pad = (w1 - 1) // 2
inputs = np.pad(inputs, pad_width=[(h_pad, h_pad), (w_pad, w_pad)], mode="constant", constant_values=0)
outputs = np.zeros(shape=(h, w))
for i in range(h): # 行号
for j in range(w): # 列号
outputs[i, j] = np.sum(np.multiply(inputs[i: i + h1, j: j + w1], kernel))
return outputs
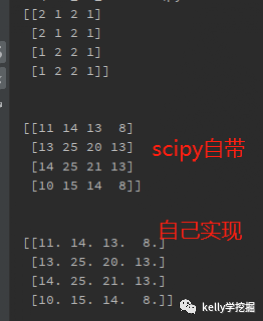
scipy中已经提供二维卷积函数scipy.signal.convolve2d,可以直接调用,下图是和自行实现的对比效果。
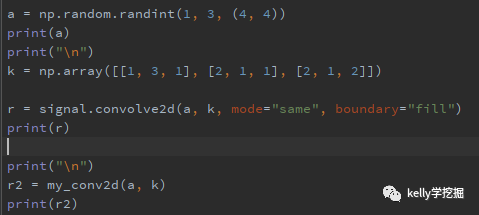
运行之后结果一致,验证自行实现的二维卷积正确。
补充:scipy.signal.convolve2d的参数说明
in1:输入矩阵
in2:卷积核
mode:指示输出矩阵的尺寸,full代表完全离散线性卷积, valid代表输出尺寸等于输入尺寸-卷积核+1, same代表输出尺寸与输入尺寸一致。
boundary:需要填充时边界填充方式,fill代表使用常量值填充, wrap代表循环方式填充, symm代表以四周边为对称轴对称填充。
fillvalue:常量填充时的填充值
(四)完整代码和运行效果
完整的python代码
class GaussianBlur(object):
def __init__(self, kernel_size=3, sigma=1.5):
self.kernel_size = kernel_size
self.sigma = sigma
self.kernel = self.gaussian_kernel()
def gaussian_kernel(self):
kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float)
radius = self.kernel_size//2
for y in range(-radius, radius + 1): # [-r, r]
for x in range(-radius, radius + 1):
# 二维高斯函数
v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2))
kernel[y + radius, x + radius] = v # 高斯函数的x和y值 vs 高斯核的下标值
kernel2 = kernel / np.sum(kernel)
return kernel2
def filter(self, img: Image.Image):
img_arr = np.array(img)
if len(img_arr.shape) == 2:
new_arr = signal.convolve2d(img_arr, self.kernel, mode="same", boundary="symm")
else:
h, w, c = img_arr.shape
new_arr = np.zeros(shape=(h, w, c), dtype=np.float)
for i in range(c):
new_arr[..., i] = signal.convolve2d(img_arr[..., i], self.kernel, mode="same", boundary="symm")
new_arr = np.array(new_arr, dtype=np.uint8)
return Image.fromarray(new_arr)
def main():
img = Image.open("Jeep-cd.jpg").convert("RGB")
img2 = GaussianBlur(sigma=2.5).filter(img)
plt.subplot(1, 2, 1)
plt.imshow(img)
plt.subplot(1, 2, 2)
plt.imshow(img2)
# dpi参数维持图片的清晰度
plt.savefig("gaussian.jpg", dpi=500)
plt.show()
pass
代码运行效果,发现经高斯模糊处理之后,图片发生明显模糊。


到此这篇关于python实现高斯模糊及原理详解的文章就介绍到这了,更多相关python 高斯模糊内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Python中使用PIL库实现图片高斯模糊实例
一.安装PIL PIL是Python Imaging Library简称,用于处理图片.PIL中已经有图片高斯模糊处理类,但有个bug(目前最新的1.1.7bug还存在),就是模糊半径写死的是2,不能设置.在源码ImageFilter.py的第160行: 所以,我们在这里自己改一下就OK了. 项目地址:http://www.pythonware.com/products/pil/ 二.修改后的代码 代码如下: 复制代码 代码如下: #-*- coding: utf-8 -*- from PIL
-
在Python中使用PIL模块对图片进行高斯模糊处理的教程
从一篇文章中看到,PIL 1.1.5 已经内置了高斯模糊,但是并没有在文档中提及,而且PIL的高斯模糊中 radius 是硬编码, 虽然构造方法中有传入 radius 参数,但压根就没有用到 (看这里),所以需要自己进行改造,当然,知道了原因, 修改起来自然非常简单了. 结合帖子中的需求,对局部进行高斯模糊,所以还需要结合使用 crop和 paste 方法实现局部使用滤镜. 代码如下: #-*- coding: utf-8 -*- from PIL import Image, ImageFilt
-
Opencv+Python实现图像运动模糊和高斯模糊的示例
运动模糊:由于相机和物体之间的相对运动造成的模糊,又称为动态模糊 Opencv+Python实现运动模糊,主要用到的函数是cv2.filter2D(): # coding: utf-8 import numpy as np import cv2 def motion_blur(image, degree=12, angle=45): image = np.array(image) # 这里生成任意角度的运动模糊kernel的矩阵, degree越大,模糊程度越高 M = cv2.getRotat
-
python实现高斯模糊及原理详解
高斯模糊是一种常见的模糊技术,相关知识点有:高斯函数.二维卷积. (一)一维高斯分布函数 一维(连续变量)高斯函数形式如下,高斯函数又称"正态分布函数": μ是分布函数的均值(或者期望),sigma是标准差. 一维高斯分布函数的图形: 从图可知,以x=0为中心,x取值距离中心越近,概率密度函数值越大,距离中心越远,密度函数值越小. (二)二维高斯分布函数 二维高斯分布函数的形式: 特别说明,当变量x和y相互独立时,则相关系数ρ=0,二维高斯分布函数可以简化为: 二维高斯分布函数的图形:
-
python super用法及原理详解
这篇文章主要介绍了python super用法及原理详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 概念 super作为python的内建函数.主要作用如下: 允许我们避免使用基类 跟随多重继承来使用 实例 在单个继承的场景下,一般使用super来调用基类来实现: 下面是一个例子: class Mammal(object): def __init__(self, mammalName): print(mammalName, 'is a wa
-
Python模块future用法原理详解
这篇文章主要介绍了Python模块future用法原理详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 计算机的知识太多了,很多东西就是一个使用过程中详细积累的过程.最近遇到了一个很久关于future的问题,踩了坑,这里就做个笔记,免得后续再犯类似错误. future的作用:把下一个新版本的特性导入到当前版本,于是我们就可以在当前版本中测试一些新版本的特性.说的通俗一点,就是你不用更新python的版本,直接加这个模块,就可以使用python
-
Python日志syslog使用原理详解
这篇文章主要介绍了Python日志syslog使用原理详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 syslog的官方说明在: https://docs.python.org/2/library/syslog.html#module-syslog 该模块的主要方式为: #!/usr/bin/python # -*- coding: utf-8 -*- import syslog syslog.openlog([ident[, logopt
-
Python定时器线程池原理详解
这篇文章主要介绍了Python定时器线程池原理详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 定时器执行循环任务: 知识储备 Timer(interval, function, args=None, kwargs=None) interval ===> 时间间隔 单位为s function ===> 定制执行的函数 使用threading的 Timer 类 start() 为通用的开始执行方法 cancel ()为取消执行的方法 普通单次
-
Python字典底层实现原理详解
在Python中,字典是通过散列表或说哈希表实现的.字典也被称为关联数组,还称为哈希数组等.也就是说,字典也是一个数组,但数组的索引是键经过哈希函数处理后得到的散列值.哈希函数的目的是使键均匀地分布在数组中,并且可以在内存中以O(1)的时间复杂度进行寻址,从而实现快速查找和修改.哈希表中哈希函数的设计困难在于将数据均匀分布在哈希表中,从而尽量减少哈希碰撞和冲突.由于不同的键可能具有相同的哈希值,即可能出现冲突,高级的哈希函数能够使冲突数目最小化.Python中并不包含这样高级的哈希函数,几个重要
-
Python学习之虚拟环境原理详解
目录 认识虚拟环境 Python中的虚拟环境工具 Virtualenv Treminal 终端演示 该章节我们学习虚拟环境的相关知识,虚拟环境对于刚刚使用Python的初学者来说使用的概率可能会比较低.但是我们依然要对它有一定的了解. 认识虚拟环境 在我们平时的工作环境中,可能会存在一台电脑存在多个版本的 python 的情况 . 比如我们有一个 Python2.7的版本,还有一个 Python3.8的环境,它们两个都存在与我们当前的系统中.这就造成了一个问题,两个版本都在同一个环境下,造成 p
-
Python图像处理之边缘检测原理详解
目录 原理 Sobel检测算子 Laplacian算子 算子比较 原理 边缘检测是图像处理和计算机视觉当中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点,图像的边缘检测可以大幅度的减少数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性,它们绝大多数可以分为两类:基于搜索和基于零穿越. 基于搜索:通过寻找图像一阶导数中max来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并在此方向找到局部梯度模的最大值,代表的算法是Sobel算子和Scharr算子.
-
python装饰器底层原理详解
目录 1 python装饰器的作用 2 python装饰器的原理 3 python装饰器的实现 3.1 最简陋的装饰器 3.2 给有返回值的函数加上装饰器 3.3 给有返回值和参数的函数加上装饰器 3.4 让我还是那个我 4 python装饰器在自动化测试框架中的应用 4.1 从一个需求开始 1 python装饰器的作用 被装饰对象加上装饰器(戴了个帽子),被装饰对象获得了更强大的功能. 2 python装饰器的原理 python装饰器本身是一个函数 这个函数的参数是一个函数对象 这个函数的返回
-
Python字典对象实现原理详解
字典类型是Python中最常用的数据类型之一,它是一个键值对的集合,字典通过键来索引,关联到相对的值,理论上它的查询复杂度是 O(1) : >>> d = {'a': 1, 'b': 2} >>> d['c'] = 3 >>> d {'a': 1, 'b': 2, 'c': 3} 在字符串的实现原理文章中,曾经出现过字典对象用于intern操作,那么字典的内部结构是怎样的呢?PyDictObject对象就是dict的内部实现. 哈希表 (HASH TA