超详细OpenMV与STM32单片机通信 附完整源码
目录
- 1.前言(闲话)
- 2.硬件连接
- 3.软件代码———OpenMV端
- 4.软件代码———STM32端
- 5.利用PC端测试数据数据是否发送接收正常
- 6.学习补充 (代码看不懂的时候可以来看一下)
- 8.博客更新
- 9.参考链接
- 10.完整版代码链接
1.前言(闲话)
最近在做电磁炮,发现题目需要用到颜色跟踪,于是花了一点时间学了一下OpenMV,只学习OpenMV是远远不够的,还需要实现与单片机的通信,本以为很简单,在CSDN上找了一些代码,直接拿来修改粘贴,把代码看明白了,这些只花了几个小时,本以为自己已经弄明白了二者之间的通信,但是在后期把OpenMV端数据传输到单片机的时候却犯了难。我选择使用OLED显示传输的数据,在这里调试了许久,中间遇到了许多之前的学习漏洞,特在此写下博客记录学习经历。*
2.硬件连接
我所用到的材料如下: 四针IIC OLED,OpenMV(OV7725),STM32F103C8T6最小系统板,数据线N条(OpenMV的数据线只能用官方自带的,其他的基本都用不了),杜邦线若干。
1.OpenMV端:由图知UART_RX—P5 ------ UART_TX—P4
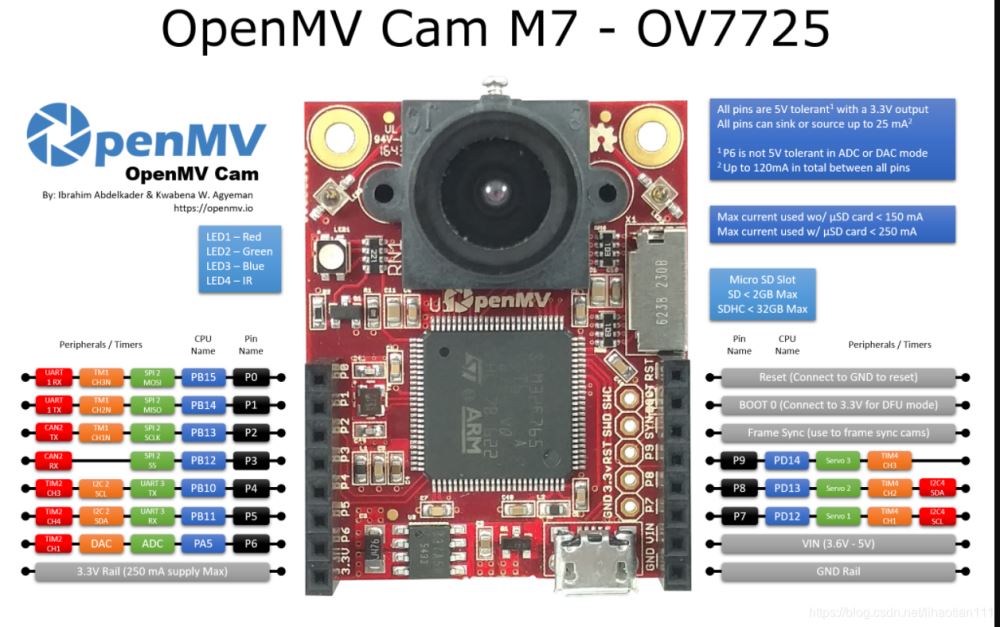
2.STM32端:USART_TX—PA9 -----USART_RX—PA10

3.四针OLED IIC连接:SDA—PA2-----SCL—PA1 由于使用的是模拟IIC而不是硬件IIC,可以根据个人需要修改IO口来控制SDA线和SCL线,只需要简单修改一下代码即可。
4.STM32的TX(RX)接OpenMV的RX(TX),OLED连接到STM32即可。
3.软件代码———OpenMV端
import sensor, image, time,math,pyb
from pyb import UART,LED
import json
import ustruct
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
red_threshold_01=(10, 100, 127, 32, -43, 67)
clock = time.clock()
uart = UART(3,115200) #定义串口3变量
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
def find_max(blobs): #定义寻找色块面积最大的函数
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
def sending_data(cx,cy,cw,ch):
global uart;
#frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B];
#data = bytearray(frame)
data = ustruct.pack("<bbhhhhb", #格式为俩个字符俩个短整型(2字节)
0x2C, #帧头1
0x12, #帧头2
int(cx), # up sample by 4 #数据1
int(cy), # up sample by 4 #数据2
int(cw), # up sample by 4 #数据1
int(ch), # up sample by 4 #数据2
0x5B)
uart.write(data); #必须要传入一个字节数组
while(True):
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01])
cx=0;cy=0;
if blobs:
max_b = find_max(blobs)
#如果找到了目标颜色
cx=max_b[5]
cy=max_b[6]
cw=max_b[2]
ch=max_b[3]
img.draw_rectangle(max_b[0:4]) # rect
img.draw_cross(max_b[5], max_b[6]) # cx, cy
FH = bytearray([0x2C,0x12,cx,cy,cw,ch,0x5B])
#sending_data(cx,cy,cw,ch)
uart.write(FH)
print(cx,cy,cw,ch)
bytearray([, , ,])组合uart.write()的作用与直接调用sending_data(cx,cy,cw,ch)作用是一样的
4.软件代码———STM32端
工程总共包含如下文件:main.c、iic.c、iic.h、oled.c、oled.h、uart.c、uart.h。由于OLED的代码存在版权问题,需要的可以邮箱私发。
/***** oled.h *****/
#ifndef __USART_H #define __USART_H #include "sys.h" void USART1_Init(void);//串口1初始化并启动 #endif
/***** oled.c *****/
#include "uart.h"
#include "oled.h"
#include "stdio.h"
static u8 Cx=0,Cy=0,Cw=0,Ch=0;
void USART1_Init(void)
{
//USART1_TX:PA 9
//USART1_RX:PA10
GPIO_InitTypeDef GPIO_InitStructure; //串口端口配置结构体变量
USART_InitTypeDef USART_InitStructure; //串口参数配置结构体变量
NVIC_InitTypeDef NVIC_InitStructure; //串口中断配置结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //打开PA端口时钟
//USART1_TX PA9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设定IO口的输出速度为50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//USART1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = 115200; //串口波特率为115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能中断
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC); //清串口1发送标志
}
//USART1 全局中断服务函数
void USART1_IRQHandler(void)
{
u8 com_data;
u8 i;
static u8 RxCounter1=0;
static u16 RxBuffer1[10]={0};
static u8 RxState = 0;
static u8 RxFlag1 = 0;
if( USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET) //接收中断
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清除中断标志
com_data = USART_ReceiveData(USART1);
if(RxState==0&&com_data==0x2C) //0x2c帧头
{
RxState=1;
RxBuffer1[RxCounter1++]=com_data;OLED_Refresh();
}
else if(RxState==1&&com_data==0x12) //0x12帧头
{
RxState=2;
RxBuffer1[RxCounter1++]=com_data;
}
else if(RxState==2)
{
RxBuffer1[RxCounter1++]=com_data;
if(RxCounter1>=10||com_data == 0x5B) //RxBuffer1接受满了,接收数据结束
{
RxState=3;
RxFlag1=1;
Cx=RxBuffer1[RxCounter1-5];
Cy=RxBuffer1[RxCounter1-4];
Cw=RxBuffer1[RxCounter1-3];
Ch=RxBuffer1[RxCounter1-2];
}
}
else if(RxState==3) //检测是否接受到结束标志
{
if(RxBuffer1[RxCounter1-1] == 0x5B)
{
USART_ITConfig(USART1,USART_IT_RXNE,DISABLE);//关闭DTSABLE中断
if(RxFlag1)
{
OLED_Refresh();
OLED_ShowNum(0, 0,Cx,3,16,1);
OLED_ShowNum(0,17,Cy,3,16,1);
OLED_ShowNum(0,33,Cw,3,16,1);
OLED_ShowNum(0,49,Ch,3,16,1);
}
RxFlag1 = 0;
RxCounter1 = 0;
RxState = 0;
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
}
else //接收错误
{
RxState = 0;
RxCounter1=0;
for(i=0;i<10;i++)
{
RxBuffer1[i]=0x00; //将存放数据数组清零
}
}
}
else //接收异常
{
RxState = 0;
RxCounter1=0;
for(i=0;i<10;i++)
{
RxBuffer1[i]=0x00; //将存放数据数组清零
}
}
}
}
解释:OpenMV发送数据包给STM32,STM32利用中断接收数据并把数据存放在RxBuffer1这个数组里,并且在中断中利用OLED显示cx,cy,cw,ch四个坐标。在中断中,有如下函数:
else if(RxState==2)
{
RxBuffer1[RxCounter1++]=com_data;
if(RxCounter1>=10||com_data == 0x5B) //RxBuffer1接受满了,接收数据结束
{
RxState=3;
RxFlag1=1;
Cx=RxBuffer1[RxCounter-5];
Cy=RxBuffer1[RxCounter-4];
Cw=RxBuffer1[RxCounter-3];
Ch=RxBuffer1[RxCounter1-2];
}
}
RxBuffer1是一个装有接收OpenMV数据的数组,RxCounter1起着一个计数器的作用,当RxBuffer[RxCounter1-1]存放的数据为数据包的帧位时,说明已经接收成功整个数据包,此时RxBuffer[RxCounter1-2]存放ch坐标值,RxBuffer[RxCounter1-3]存放cw坐标值,RxBuffer[RxCounter1-4]存放cy坐标值,RxBuffer[RxCounter1-5]存放cx坐标值,此后在RxState=3过程中将这四个坐标显示出来即可。
特别注意的是:STM32中断每发生一次,只会接收到一字节的数据,因此,进行七次才会接收完一整帧的数据包,这一点需要读者仔细揣摩,结合上文中说的静态变量关键字static,定义了:
u8 com_data;
u8 i;
static u8 RxCounter1=0;
static u8 RxBuffer1[10]={0};
static u8 RxState = 0;
static u8 RxFlag1 = 0;
请读者仔细揣摩为什么com_data(端口接收到的数据)、i定义的是动态的(auto),而RxBuffer1(装接收到数据的静态全局数组)、RxState(状态标志变量)、RxFlag1(接受结束标志变量)定义的确实静态的,这一点并不难理解。
5.利用PC端测试数据数据是否发送接收正常
在进行OpenMV与STM32的通信测试过程中,我使用了USB转TTL模块,将OpenMV(或STM32单片机)与PC端进行通信确保数据发出或者接收正常。
OpenMV&&PC
OpenMV_RX接模块TX
OpenMV_TX接模块RX
OpenMV_GND接模块GND
然后打开OpenMV,在大循环while(True)中使用语句:
DATA=bytearray[(1,2,3,4,5)] uart.write(DATA)
打开PC端串口助手,注意设置一样的波特率、停止位、发送字节数等,查看串口助手是否接受到了数据。
STM32&&PC
STM32_RX接模块TX
STM32_TX接模块RX
STM32_GND接模块GND
注意:不管是STM32与PC还是OpenMV与PC还是STM32与OpenMV通信,都要将二者的GND连接在一起。
在main.c中先调用stdio头文件,大循环中使用如下语句:
while(1)
{
printf("HelloWorld!");
}
打开串口助手查看是否接收到了数据。
6.学习补充 (代码看不懂的时候可以来看一下)
补充1:static关键字(静态变量)的使用
static 修饰全局函数和全局变量,只能在本源文件使用。举个例子,比如用以下语句static u8 RxBuffer[10] 定义了一个名为RxBuffer的静态数组,数组元素类型为unsigned char型。在包含Rxbuffer的源文件中,Rxbuffer相当于一个全局变量,任意地方修改RxBuffer的值,RxBuffer都会随之改变。而且包含RxBuffer的函数在多次运行后RxBuffer的值会一直保存(除非重新赋值)。在C语言学习中,利用static关键字求阶乘是一个很好的例子:
#include“stdio.h”
long fun(int n);
void main()
{
int i,n;
printf("input the value of n:");
scanf("%d",&n);
for(i=1;i<=n;i++)
{
printf("%d! = %1d\n",i,fun(i));
}
}
>long fun(int n)
{
static long p=1;
p=p*n;
return p;
}
效果为依次输出n!(n=1,2,3…n)
这个例子中,第一次p的值为1,第二次p的值变成了p x n=1 x 2=2,这个值会一直保存,如果p没有定义为静态类型,那么在第一次运算过后p的值会重新被赋值为1,这就是auto型(不声明默认为auto型)与static型的最大区别。
总结:static关键字定义的变量是全局变量,在static所包含的函数多次运行时,该变量不会被多次初始化,只会初始化一次。
补充2:extern关键字(外部变量)的使用
程序的编译单位是源程序文件,一个源文件可以包含一个或若干个函数。在函数内定义的变量是局部变量,而在函数之外定义的变量则称为外部变量,外部变量也就是我们所讲的全局变量。它的存储方式为静态存储,其生存周期为整个程序的生存周期。全局变量可以为本文件中的其他函数所共用,它的有效范围为从定义变量的位置开始到本源文件结束。
如果整个工程由多个源文件组成,在一个源文件中想引用另外一个源文件中已经定义的外部变量,同样只需在引用变量的文件中用 extern 关键字加以声明即可。下面就来看一个多文件的示例:
/****max.c****/
#include <stdio.h>
/*外部变量声明*/
extern int g_X ;
extern int g_Y ;
int max()
{
return (g_X > g_Y ? g_X : g_Y);
}
/***main.c****/
#include <stdio.h>
/*定义两个全局变量*/
int g_X=10;
int g_Y=20;
int max();
int main(void)
{
int result;
result = max();
printf("the max value is %d\n",result);
return 0;
}
运行结果为:
the max value is 20
对于多个文件的工程,都可以采用上面这种方法来操作。对于模块化的程序文件,可在其文件中预先留好外部变量的接口,也就是只采用 extern 声明变量,而不定义变量,max.c 文件中的 g_X 与 g_Y 就是如此操作的。比如想要在主函数中调用usart.c中的变量x,usart.c中有着这样的定义:static u8 x=0在usart.h中可以这样写:extern u8 x在main.c中包含usart.h头文件,这样在编译的时候就会在main.c中调用x外部变量。
总结:extern关键字是外部变量,静态类型的全局变量,可以在源文件中调用其他文件中的变量,在多文件工程中配合头文件使用。
补充3:MicroPython一些库函数的解释
1.ustruct.pack函数:
import ustruct,在ustruct中
data = ustruct.pack("<bbhhhhb", #格式为俩个字符俩个短整型(2字节)
0x2C, #帧头1
0x12, #帧头2
int(cx), # up sample by 4 #数据1
int(cy), # up sample by 4 #数据2
int(cw), # up sample by 4 #数据1
int(ch), # up sample by 4 #数据2
0x5B)
""bbhhhhb"简单来说就是要发送数据的声明,bbhhhhb共七个,代表发送七个数据,对照下面的表,可以知道七个数据按时序发送为unsigner char、unsigned char、short、short、short、short、unsigned char。0x2c为数据帧的帧头,即检测到数据流的开始,但是一个帧头可能会出现偶然性,因此设置两个帧头0x2c与0x12以便在中断中检测是否检测到了帧头以便存放有用数据。0x5b为帧尾,即数据帧结束的标志。

2.bytearray([ , , , ])函数:
用于把十六进制数据以字节形式存放到字节数组中,以便以数据帧的形式发送出去进行通信。
FH = bytearray([0x2C,0x12,cx,cy,cw,ch,0x5B]) uart,write(FH)
7.效果展示(可以先来看效果)
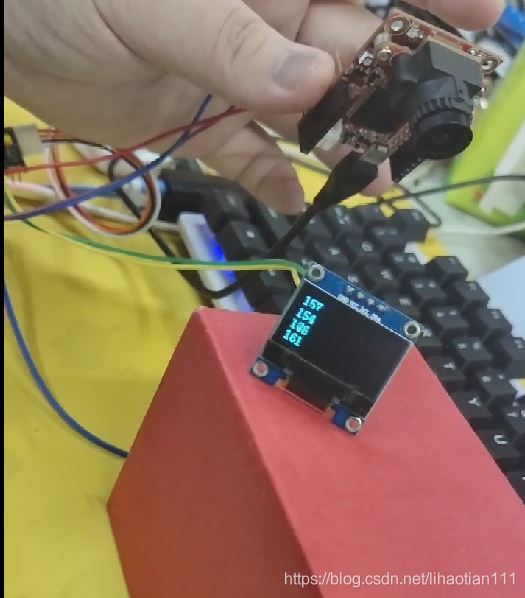
从上到下依次为CX,CY,CW,CH
8.博客更新
1.有朋友反馈OpenMv端找不到色块就会报错,解决方案如下:
while(True):
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01])
cx=0;cy=0;
if blobs:
max_b = find_max(blobs)
#如果找到了目标颜色
cx=max_b[5]
cy=max_b[6]
cw=max_b[2]
ch=max_b[3]
img.draw_rectangle(max_b[0:4]) # rect
img.draw_cross(max_b[5], max_b[6]) # cx, cy
FH = bytearray([0x2C,0x12,cx,cy,cw,ch,0x5B])
#sending_data(cx,cy,cw,ch)
uart.write(FH)
print(cx,cy,cw,ch)
在以上代码中,将max_b = find_max(blobs) 移到if blobs外即可。
2.有朋友反馈OpenMV发送数据只能发送一个字节,也就是说大于255的数据无法直接通过代码完成,现在提供以下解决方案:在STM32端代码中依次保存大于255数字的高八位和低八位最后在组合在一起即可。
2021/9/15更新 4字节与浮点数之间的转换(参考)
#if 1
int main()
{
#if 0
//字符型数据分成四个字节存放在数组中
float m = 23.25;
unsigned char *a;
a = (unsigned char *)&m;
printf("0x%x \n0x%x \n0x%x \n0x%x \n",a[0],a[1],a[2],a[3]);
#endif
#if 1
//四个字节数据合成存放在数组中
unsigned char a[]={0x00,0x00,0xba,0x41};
float BYTE;
BYTE = *(float *)&a;
printf("%f\n",BYTE);
#endif
}
#endif
上述代码实现了将四个字节转换为一个浮点数的功能,同时也实现了将一个浮点数拆分为四个字节功能。在Openmv传数据时,只能传输一个字节,大于255的数无法以一字节形式发送,因此可以在Openmv端将该数据拆分成两个字节,分别发送给Stm32端,同时Stm32端对传来的数据进行合成,合成并解析为对应的数据。
另一种解决方案:python传数据的1/2,单片机在乘2即可。
9.参考链接
[1]extern外部变量参考链接
[2]星瞳科技OpenMV中文参考手册官方
[3]MicroPython函数库
10.完整版代码链接
完整版代码链接(点赞收藏免费哦)
到此这篇关于超详细OpenMV与STM32单片机通信 附完整源码的文章就介绍到这了,更多相关OpenMV与STM32单片机通信内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

基于OpenMV的图像识别之数字识别功能
目录 基于OpenMV的图像识别 OpenMV简介 一.数字识别 基于OpenMV的图像识别 OpenMV简介 什么是OpenMV OpenMV是由美国克里斯团队基于MicroPython发起的开源机器视觉项目,目的是创建低成本,可扩展,使用python驱动的机器视觉模块.OpenMV搭载了MicroPython解释器,使其可以在嵌入式端进行python开发,关于MicroPython可以参照我之前的博客专栏:MicroPython. OpenMV基于32位,ARM Cortex-M7内核的Op
-
详解OpenMV图像处理的基本方法
目录 一.图像处理基础知识 二.OpenMV图像处理的基本方法 1. 感光元件 相关名词解释 2. 图像的基本运算 3. 使用图像的统计信息 4. 画图 5. 寻找色块 6. AprilTag实现标记跟踪 6. 模版匹配NCC 7. 多模版匹配 8. 特征点检测 9. 测距 10. 扫码识别 11. 颜色形状同时识别 12. 颜色模版匹配同时识别 13.分辨不同人脸 14. 高级特征 一.图像处理基础知识 1.摄像头:光学信号转换成电信号.计算机视觉中,最简单的模型是小孔成像模型. 小孔成像是一
-
超详细OpenMV与STM32单片机通信 附完整源码
目录 1.前言(闲话) 2.硬件连接 3.软件代码---OpenMV端 4.软件代码---STM32端 5.利用PC端测试数据数据是否发送接收正常 6.学习补充 (代码看不懂的时候可以来看一下) 8.博客更新 9.参考链接 10.完整版代码链接 1.前言(闲话) 最近在做电磁炮,发现题目需要用到颜色跟踪,于是花了一点时间学了一下OpenMV,只学习OpenMV是远远不够的,还需要实现与单片机的通信,本以为很简单,在CSDN上找了一些代码,直接拿来修改粘贴,把代码看明白了,这些只花了几个小时,本以
-
微信小程序之侧边栏滑动实现过程解析(附完整源码)
一.效果图 讲什么都不如直接上效果图好,所以我们先来看下实现效果如何. 通过滑动屏幕,或者点击左上角的图标按钮,都能实现侧边栏的划出效果. 二.原理解析 1.先实现侧边栏的内容,让侧边栏的内容居左,然后将侧边栏的内容置于屏幕的最底部. 2.接着实现主页的内容,并且让主页的内容默认是覆盖在侧边栏的内容上面. 3.然后,实现手指滑动屏幕的时候,主页的内容,向左滑动一定的宽度,让侧边栏的内容显示出来,而滑动的效果是通过 css 的 transition 来实现的. 三.源码 由于实现过程的时,我对代码
-
使用python+pygame开发消消乐游戏附完整源码
效果是这样的 ↓ ↓ ↓ 一.环境要求 windows系统,python3.6+ pip21+ 开发环境搭建地址 一起来学pygame吧 游戏开发30例(开篇词)--环境搭建+游戏效果展示 安装游戏依赖模块 pip install pygame 二.游戏简介 消消乐应该大家都玩过,或者看过.这个花里胡哨的小游戏 用python的pygame来实现,很简单. 今天带大家,用Python来实现一下这个花里胡哨的小游戏. 三.完整开发流程 1.项目主结构 首先,先整理一下项目的主结构,其实看一下主结构
-
Java实现飞机大战游戏 附完整源码
目录 飞机大战详细文档 实现效果: 结构设计 详细分析 Main界面类使用边框布局,给面板分三个区,如图所示 绘制背景地图 飞行道具类UML图 绘制线程: 如何让我们的游戏动起来 背景的绘制 我的飞机的绘制 移动线程 如何控制我的飞机移动? 敌方飞机线程 : 如何生成敌方飞机呢? 敌方子弹线程 : 使每一个敌方飞机开火 检测碰撞线程 : 在子弹与敌机碰撞时,移除敌机 其他功能:显示玩家hp,掉落道具,得分,升级,更换地图 飞机大战详细文档 文末有源代码,以及本游戏使用的所有素材,将plane2文
-
基于spring-boot和docker-java实现对docker容器的动态管理和监控功能[附完整源码下载]
docker简介 Docker 是一个开源的应用容器引擎,和传统的虚拟机技术相比,Docker 容器性能开销极低,因此也广受开发者喜爱.随着基于docker的开发者越来越多,docker的镜像也原来越丰富,未来各种企业级的完整解决方案都可以直接通过下载镜像拿来即用.因此docker变得越来越重要. 本文目的 本文通过一个项目实例来介绍如果通过docker对外接口来实现对docker容器的管理和监控. 应用场景: 对服务器资源池通过docker进行统一管理,按需分配资源和创建容器,达到资源最大化利
-
javascript实现打砖块小游戏(附完整源码)
小时候玩一天的打砖块小游戏,附完整源码 在?给个赞? 实现如图 需求分析 1.小球在触碰到大盒子上.左.右边框,以及滑块后沿另一方向反弹,在碰到底边框后游戏结束: 2.小球在触碰到方块之后,方块消失: 3.消除所有方块获得游戏胜利: 4.可通过鼠标与键盘两种方式移动滑块: 5.游戏难度可调整,实时显示得分. 代码分析 1.html结构:左右两个提示框盒子分别用一个div,在其中添加需要的内容:中间主体部分用一个div,里面包含一个滑块(slider),一个小球(ball),以及一个装有所有方块的
-
python抢购软件/插件/脚本附完整源码
距上篇关于淘宝抢购源码的文章已经过去五个月了,五个月来我通过不停的学习,掌握了更深层的抢购技术及原理,而上篇文章中我仅分享了关于加入购物车的商品的抢购源码,且有部分不足. 博主不提供任何服务器端程序,也不提供任何收费抢购软件.该文章仅作为学习selenium框架及GUI开发的一个示例代码.该思路可运用到其他任何网站,京东,天猫,淘宝均可使用,且不属于外挂或者软件之类,只属于一个自动化点击工具,如有侵犯到任何公司的合法权益,请私信联系,会第一时间将相关代码给予删除. 本篇文章我将附上完整源码,及其
-
半小时实现Java手撸网络爬虫框架(附完整源码)
最近在做一个搜索相关的项目,需要爬取网络上的一些链接存储到索引库中,虽然有很多开源的强大的爬虫框架,但本着学习的态度,自己写了一个简单的网络爬虫,以便了解其中的原理.今天,就为小伙伴们分享下这个简单的爬虫程序!! 首先介绍每个类的功能: DownloadPage.java的功能是下载此超链接的页面源代码. FunctionUtils.java 的功能是提供不同的静态方法,包括:页面链接正则表达式匹配,获取URL链接的元素,判断是否创建文件,获取页面的Url并将其转换为规范的Url,截取网页网页源
-
Android串口通信apk源码详解(附完整源码)
1.SerialPortHelper「Android串口通信」介绍 原项目地址 https://github.com/freyskill/SerialPortHelper Android串口通讯助手可以用于需要使用串口通信的Android外设,该库有如下特点: 1.串口通信部分使用C++实现,在笔者接触的部分设备上实测,使用C++实现与Google官方提供的Demo的方式要快: 2.支持且必须设置串口接收最大数据长度,初始化库时填入该参数,这样设置的原因是考虑在实际使用中,规定的串口通信协议格式
-
Android开发中总结的Adapter工具类【附完整源码下载】
本文实例讲述了Android开发中总结的Adapter工具类.分享给大家供大家参考,具体如下: Adapter是连接后端数据和前端显示的适配器接口,是数据和UI(View)之间一个重要的纽带.在常见的View(ListView,GridView)等地方都需要用到Adapter. 每个开发工程师都会有自己的一些常用到的工具类,今天我分享一下我自己总结的关于Adapter的工具类,话不多说直接上代码 CommonAdapter: public abstract class CommonAdapter