C语言驱动开发之通过ReadFile与内核层通信
驱动与应用程序的通信是非常有必要的,内核中执行代码后需要将其动态显示给应用层,但驱动程序与应用层毕竟不在一个地址空间内,为了实现内核与应用层数据交互则必须有通信的方法,微软为我们提供了三种通信方式,如下先来介绍通过ReadFile系列函数实现的通信模式。
长话短说,不说没用的概念,首先系统中支持的通信模式可以总结为三种。
- 缓冲区方式读写(DO_BUFFERED_IO)
- 直接方式读写(DO_DIRECT_IO)
- 其他方式读写
而通过ReadFile,WriteFile系列函数实现的通信机制则属于缓冲区通信模式,在该模式下操作系统会将应用层中的数据复制到内核中,此时应用层调用ReadFile,WriteFile函数进行读写时,在驱动内会自动触发 IRP_MJ_READ 与 IRP_MJ_WRITE这两个派遣函数,在派遣函数内则可以对收到的数据进行各类处理。
首先需要实现初始化各类派遣函数这么一个案例,如下代码则是通用的一种初始化派遣函数的基本框架,分别处理了IRP_MJ_CREATE创建派遣,以及IRP_MJ_CLOSE关闭的派遣,此外函数DriverDefaultHandle的作用时初始化其他派遣用的,也就是将除去CREATE/CLOSE这两个派遣之外,其他的全部赋值成初始值的意思,当然不增加此段代码也是无妨,并不影响代码的实际执行。
#include <ntifs.h>
// 卸载驱动执行
VOID UnDriver(PDRIVER_OBJECT pDriver)
{
PDEVICE_OBJECT pDev; // 用来取得要删除设备对象
UNICODE_STRING SymLinkName; // 局部变量symLinkName
pDev = pDriver->DeviceObject;
IoDeleteDevice(pDev); // 调用IoDeleteDevice用于删除设备
RtlInitUnicodeString(&SymLinkName, L"\\??\\LySharkDriver"); // 初始化字符串将symLinkName定义成需要删除的符号链接名称
IoDeleteSymbolicLink(&SymLinkName); // 调用IoDeleteSymbolicLink删除符号链接
DbgPrint("驱动卸载完毕...");
}
// 创建设备连接
// LyShark.com
NTSTATUS CreateDriverObject(IN PDRIVER_OBJECT pDriver)
{
NTSTATUS Status;
PDEVICE_OBJECT pDevObj;
UNICODE_STRING DriverName;
UNICODE_STRING SymLinkName;
// 创建设备名称字符串
RtlInitUnicodeString(&DriverName, L"\\Device\\LySharkDriver");
Status = IoCreateDevice(pDriver, 0, &DriverName, FILE_DEVICE_UNKNOWN, 0, TRUE, &pDevObj);
// 指定通信方式为缓冲区
pDevObj->Flags |= DO_BUFFERED_IO;
// 创建符号链接
RtlInitUnicodeString(&SymLinkName, L"\\??\\LySharkDriver");
Status = IoCreateSymbolicLink(&SymLinkName, &DriverName);
return STATUS_SUCCESS;
}
// 创建回调函数
NTSTATUS DispatchCreate(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
pIrp->IoStatus.Status = STATUS_SUCCESS; // 返回成功
DbgPrint("派遣函数 IRP_MJ_CREATE 执行 \n");
IoCompleteRequest(pIrp, IO_NO_INCREMENT); // 指示完成此IRP
return STATUS_SUCCESS; // 返回成功
}
// 关闭回调函数
NTSTATUS DispatchClose(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
pIrp->IoStatus.Status = STATUS_SUCCESS; // 返回成功
DbgPrint("派遣函数 IRP_MJ_CLOSE 执行 \n");
IoCompleteRequest(pIrp, IO_NO_INCREMENT); // 指示完成此IRP
return STATUS_SUCCESS; // 返回成功
}
// 默认派遣函数
NTSTATUS DriverDefaultHandle(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
NTSTATUS status = STATUS_SUCCESS;
pIrp->IoStatus.Status = status;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return status;
}
// 入口函数
// By: LyShark
NTSTATUS DriverEntry(PDRIVER_OBJECT pDriver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark \n");
// 调用创建设备
CreateDriverObject(pDriver);
pDriver->DriverUnload = UnDriver; // 卸载函数
pDriver->MajorFunction[IRP_MJ_CREATE] = DispatchCreate; // 创建派遣函数
pDriver->MajorFunction[IRP_MJ_CLOSE] = DispatchClose; // 关闭派遣函数
// 初始化其他派遣
for (ULONG i = 0; i < IRP_MJ_MAXIMUM_FUNCTION; i++)
{
DbgPrint("初始化派遣: %d \n", i);
pDriver->MajorFunction[i] = DriverDefaultHandle;
}
DbgPrint("驱动加载完成...");
return STATUS_SUCCESS;
}
代码运行效果如下:
通用框架有了,接下来就是让该驱动支持使用ReadWrite的方式实现通信,首先我们需要在DriverEntry处增加两个派遣处理函数的初始化。
// 入口函数
// By: LyShark
NTSTATUS DriverEntry(PDRIVER_OBJECT pDriver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark \n");
// 调用创建设备
CreateDriverObject(pDriver);
// 初始化其他派遣
for (ULONG i = 0; i < IRP_MJ_MAXIMUM_FUNCTION; i++)
{
DbgPrint("初始化派遣: %d \n", i);
pDriver->MajorFunction[i] = DriverDefaultHandle;
}
pDriver->DriverUnload = UnDriver; // 卸载函数
pDriver->MajorFunction[IRP_MJ_CREATE] = DispatchCreate; // 创建派遣函数
pDriver->MajorFunction[IRP_MJ_CLOSE] = DispatchClose; // 关闭派遣函数
// 增加派遣处理
pDriver->MajorFunction[IRP_MJ_READ] = DispatchRead; // 读取派遣函数
pDriver->MajorFunction[IRP_MJ_WRITE] = DispatchWrite; // 写入派遣函数
DbgPrint("驱动加载完成...");
return STATUS_SUCCESS;
}
接着,我们需要分别实现这两个派遣处理函数,如下DispatchRead负责读取时触发,与之对应DispatchWrite负责写入触发。
- 引言:
- 对于读取请求I/O管理器分配一个与用户模式的缓冲区大小相同的系统缓冲区
SystemBuffer,当完成请求时I/O管理器将驱动程序已经提供的数据从系统缓冲区复制到用户缓冲区。 - 对于写入请求,会分配一个系统缓冲区并将
SystemBuffer设置为地址,用户缓冲区的内容会被复制到系统缓冲区,但是不设置UserBuffer缓冲。
通过IoGetCurrentIrpStackLocation(pIrp)接收读写请求长度,偏移等基本参数,AssociatedIrp.SystemBuffer则是读写缓冲区,IoStatus.Information是输出缓冲字节数,Parameters.Read.Length是读取写入的字节数。
// 读取回调函数
NTSTATUS DispatchRead(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
NTSTATUS Status = STATUS_SUCCESS;
PIO_STACK_LOCATION Stack = IoGetCurrentIrpStackLocation(pIrp);
ULONG ulReadLength = Stack->Parameters.Read.Length;
char szBuf[128] = "hello lyshark";
pIrp->IoStatus.Status = Status;
pIrp->IoStatus.Information = ulReadLength;
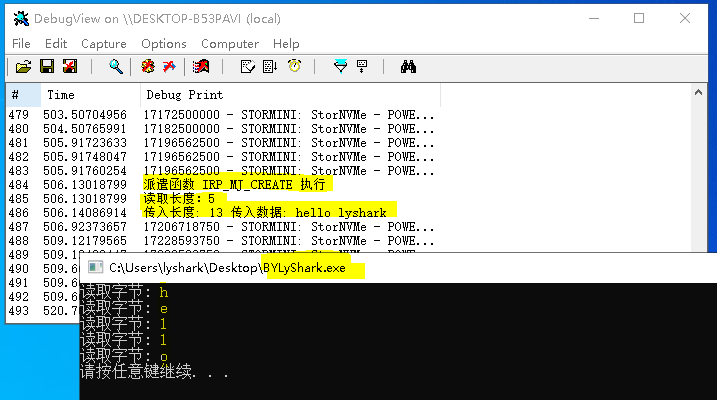
DbgPrint("读取长度:%d \n", ulReadLength);
// 取出字符串前5个字节返回给R3层
memcpy(pIrp->AssociatedIrp.SystemBuffer, szBuf, ulReadLength);
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return Status;
}
// 接收传入回调函数
// By: LyShark
NTSTATUS DispatchWrite(struct _DEVICE_OBJECT *DeviceObject, struct _IRP *Irp)
{
NTSTATUS Status = STATUS_SUCCESS;
PIO_STACK_LOCATION Stack = IoGetCurrentIrpStackLocation(Irp);
ULONG ulWriteLength = Stack->Parameters.Write.Length;
PVOID ulWriteData = Irp->AssociatedIrp.SystemBuffer;
// 输出传入字符串
DbgPrint("传入长度: %d 传入数据: %s \n", ulWriteLength, ulWriteData);
IoCompleteRequest(Irp, IO_NO_INCREMENT);
return Status;
}
如上部分都是在讲解驱动层面的读写派遣,应用层还没有介绍,在应用层我们只需要调用ReadFile函数当调用该函数时驱动中会使用DispatchRead派遣例程来处理这个请求,同理调用WriteFile函数则触发的是DispatchWrite派遣例程。
我们首先从内核中读出前五个字节并放入缓冲区内,输出该缓冲区内的数据,然后在调用写入,将hello lyshark写回到内核里里面,这段代码可以这样来写。
#include <iostream>
#include <Windows.h>
#include <winioctl.h>
int main(int argc, char *argv[])
{
HANDLE hDevice = CreateFileA("\\\\.\\LySharkDriver", GENERIC_READ | GENERIC_WRITE, 0,
NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);
if (hDevice == INVALID_HANDLE_VALUE)
{
CloseHandle(hDevice);
return 0;
}
// 从内核读取数据到本地
char buffer[128] = { 0 };
ULONG length;
// 读入到buffer长度为5
// By:lyshark.com
ReadFile(hDevice, buffer, 5, &length, 0);
for (int i = 0; i < (int)length; i++)
{
printf("读取字节: %c", buffer[i]);
}
// 写入数据到内核
char write_buffer[128] = "hello lyshark";
ULONG write_length;
WriteFile(hDevice, write_buffer, strlen(write_buffer), &write_length, 0);
system("pause");
CloseHandle(hDevice);
return 0;
}
使用驱动工具安装我们的驱动,然后运行该应用层程序,实现通信,效果如下所示:
到此这篇关于C语言驱动开发之通过ReadFile与内核层通信的文章就介绍到这了,更多相关C语言 ReadFile内核层通信内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

详解C语言内核字符串拷贝与比较
在上一篇文章<驱动开发:内核字符串转换方法>中简单介绍了内核是如何使用字符串以及字符串之间的转换方法,本章将继续探索字符串的拷贝与比较,与应用层不同内核字符串拷贝与比较也需要使用内核专用的API函数,字符串的拷贝往往伴随有内核内存分配,我们将首先简单介绍内核如何分配堆空间,然后再以此为契机简介字符串的拷贝与比较. 首先内核中的堆栈分配可以使用ExAllocatePool()这个内核函数实现,此外还可以使用ExAllocatePoolWithTag()函数,两者的区别是,第一个函数可以直接分配内
-
详解C语言内核中的链表与结构体
Windows内核中是无法使用vector容器等数据结构的,当我们需要保存一个结构体数组时,就需要使用内核中提供的专用链表结构LIST_ENTRY通过一些列链表操作函数对结构体进行装入弹出等操作,如下代码是本人总结的内核中使用链表存储多个结构体的通用案例. 首先实现一个枚举用户进程功能,将枚举到的进程存储到链表结构体内. #include <ntifs.h> #include <windef.h> extern PVOID PsGetProcessPeb(_In_ PEPROCES
-
详解C语言内核中的自旋锁结构
提到自旋锁那就必须要说链表,在上一篇<驱动开发:内核中的链表与结构体>文章中简单实用链表结构来存储进程信息列表,相信读者应该已经理解了内核链表的基本使用,本篇文章将讲解自旋锁的简单应用,自旋锁是为了解决内核链表读写时存在线程同步问题,解决多线程同步问题必须要用锁,通常使用自旋锁,自旋锁是内核中提供的一种高IRQL锁,用同步以及独占的方式访问某个资源. 首先以简单的链表为案例,链表主要分为单向链表与双向链表,单向链表的链表节点中只有一个链表指针,其指向后一个链表元素,而双向链表节点中有两个链表节
-
详解C语言内核字符串转换方法
在内核编程中字符串有两种格式ANSI_STRING与UNICODE_STRING,这两种格式是微软推出的安全版本的字符串结构体,也是微软推荐使用的格式,通常情况下ANSI_STRING代表的类型是char *也就是ANSI多字节模式的字符串,而UNICODE_STRING则代表的是wchar*也就是UNCODE类型的字符,如下文章将介绍这两种字符格式在内核中是如何转换的. 在内核开发模式下初始化字符串也需要调用专用的初始化函数,如下分别初始化ANSI和UNCODE字符串,我们来看看代码是如何实现
-
C语言驱动开发之通过ReadFile与内核层通信
驱动与应用程序的通信是非常有必要的,内核中执行代码后需要将其动态显示给应用层,但驱动程序与应用层毕竟不在一个地址空间内,为了实现内核与应用层数据交互则必须有通信的方法,微软为我们提供了三种通信方式,如下先来介绍通过ReadFile系列函数实现的通信模式. 长话短说,不说没用的概念,首先系统中支持的通信模式可以总结为三种. 缓冲区方式读写(DO_BUFFERED_IO) 直接方式读写(DO_DIRECT_IO) 其他方式读写 而通过ReadFile,WriteFile系列函数实现的通信机制则属于缓
-
C语言驱动开发内核枚举IoTimer定时器解析
目录 正文 枚举Io定时器过程 GetIoInitializeTimerAddress()函数 nt!IoInitializeTimer+0x5d 输出位置 特征搜索部分 IO_TIMER结构体定义 正文 今天继续分享内核枚举系列知识,这次我们来学习如何通过代码的方式枚举内核IoTimer定时器,内核定时器其实就是在内核中实现的时钟,该定时器的枚举非常简单,因为在IoInitializeTimer初始化部分就可以找到IopTimerQueueHead地址,该变量内存储的就是定时器的链表头部.枚举
-
Go语言驱动低代码应用引擎工具Yao开发管理系统
目录 前言 Yao简介 安裝 使用 基本使用 创建数据模型 编写接口 编写界面 总结 前言 之前写过一篇关于阿里的低代码工具LowCodeEngine的文章,发现大家还是挺感兴趣的.最近又发现了一款很有意思的低代码工具Yao,支持使用JSON的形式开发管理系统,不仅可以用来开发后端API,还能用来开发前端界面,简洁而且高效,推荐给大家! SpringBoot实战电商项目mall(50k+star)地址:https://github.com/macrozheng/mall Yao简介 Yao是一款
-
Go语言程序开发gRPC服务
目录 前言 介绍 入门 proto server client 流方式 proto server client 验证器 proto Token 认证 认证函数: 拦截器: 初始化: 实现接口: 连接: 单向证书认证 生成证书 gRPC 代码 双向证书认证 生成带 SAN 的证书 gRPC 代码 Python 客户端 总结 前言 gRPC 这项技术真是太棒了,接口约束严格,性能还高,在 k8s 和很多微服务框架中都有应用. 作为一名程序员,学就对了. 之前用 Python 写过一些 gRPC 服务
-
用Python进行行为驱动开发的入门教程
为驱动开发(Behavior-Driven Development,BDD)是一种卓越的开发模式.能帮助开发者养成日清日结的好习惯,从而避免甚至杜绝"最后一分钟"的情况出现,因此对提高代码质量是大有裨益的.其与Gherkin语法相结合的测试结构及设计形式,使得对团队的全部成员包括非技术人员都具有极好的易读性. 所有代码都必须进行测试,这意味着上线时把系统瑕疵降到最低甚至为零.这需要与完整的测试套件相配,从整体把控软件行为,使得检测与维护都能有序进行.这就是BDD的魅力所在,难道不心动吗
-
.Net语言Smobiler开发之如何在手机上实现表单设计
最前面的话:Smobiler是一个在VS环境中使用.Net语言来开发APP的开发平台,也许比Xamarin更方便 一.目标样式 我们要实现上图中的效果,需要如下的操作: 1.从工具栏上的"Smobiler Components"拖动一个一个TableView控件到窗体界面上 2.修改GridView控件的属性 a.load事件代码 VB: Private Sub TestTableView_Load(sender As Object, e As EventArgs)Handles My
-
.Net语言Smobiler开发利用Gridview控件设计较复杂的表单
最前面的话:Smobiler是一个在VS环境中使用.Net语言来开发APP的开发平台,也许比Xamarin更方便. 一.目标样式 我们要实现上图中的效果,需要如下的操作: 1.从工具栏上的"Smobiler Components"拖动一个GridView控件到窗体界面上 2.修改GridView控件的属性 a.load事件代码 VB: Private Sub TestGridView3_Load(senderAs Object, e As EventArgs)Handles MyBa
-
.Net语言Smobiler开发之如何仿微信朋友圈的消息样式
最前面的话:Smobiler是一个在VS环境中使用.Net语言来开发APP的开发平台,也许比Xamarin更方便 一.目标样式 我们要实现上图中的效果,需要如下的操作: 1.从工具栏上的"Smobiler Components"拖动一个MicroBlog控件到窗体界面上 2.用代码添加手机界面上显示的内容 Load事件代码: VB: Private Sub TestMicroBlog_Load(sender As Object, e As EventArgs) Handles MyBa
-
Go语言服务器开发之简易TCP客户端与服务端实现方法
本文实例讲述了Go语言服务器开发之简易TCP客户端与服务端实现方法.分享给大家供大家参考.具体实现方法如下: Go语言具备强大的服务器开发支持,这里示范了最基础的服务器开发:通过TCP协议实现客户端与服务器的通讯. 一 服务端,为每个客户端新开一个goroutine 复制代码 代码如下: func ServerBase() { fmt.Println("Starting the server...") //create listener listener,
-
Go语言服务器开发实现最简单HTTP的GET与POST接口
本文实例讲述了Go语言服务器开发实现最简单HTTP的GET与POST接口.分享给大家供大家参考.具体分析如下: Go语言提供了http包,可以很轻松的开发http接口.以下为示例代码: 复制代码 代码如下: package webserver import ( "encoding/json" "fmt" "net/http" "time" ) func WebServerB